Research Concepts RC4000 User Manual
Page 148
RC4000 Antenna Controller
Chapter 4
Support
140
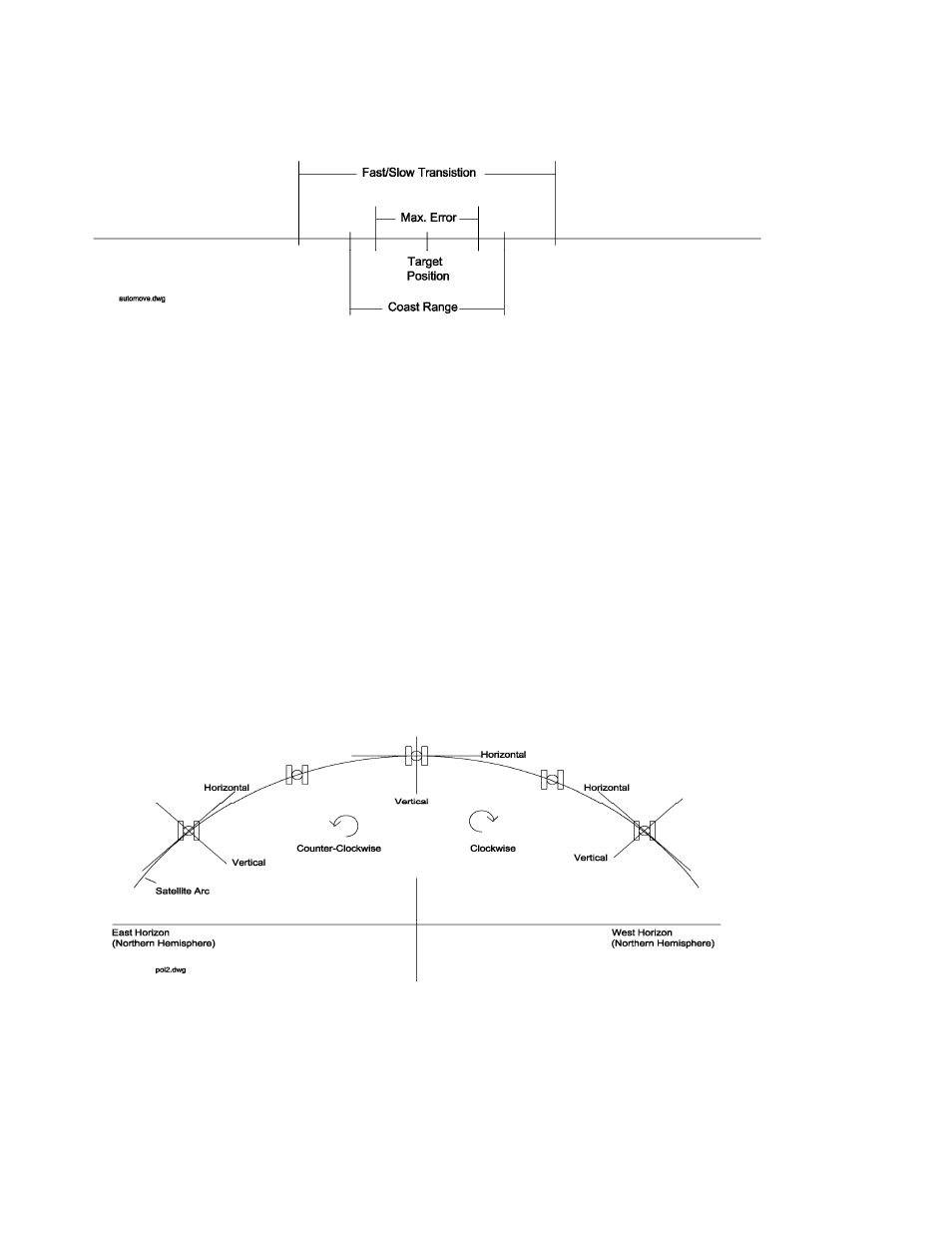
The Fast/Slow Transition parameter defines how far away from a target position the RC4000 will switch
from fast to slow motor speed. The Coast Range defines where the RC4000 will de-energize the motor
drive to allow the mount’s inertia to coast into the target position. The Max Error parameter defines how
close to the target position will be considered good enough.
Note that the DC motor control module in the RC4000 provides for smooth acceleration/deceleration, load
regulation and dynamic braking of the motors.
4.3.4 Polarization Control
The RC4000 calculates the required position and automatically moves the polarization axis as part of the
satellite LOCATE function. The following diagram shows the polarization axis sign convention used. The
diagram depicts looking at the arc of satellites from behind the antenna.
The RC4000 allows the user to specify the type of polarization axis mechanism present. If a circular
polarization scheme is present, no automatic movement of the polarization axis is performed. If a linear
polarization scheme is present, the RC4000 will calculate the theoretical position as a function of mount
latitude, mount longitude and satellite longitude.