Research Concepts RC4000 User Manual
Page 63
RC4000 Antenna Controller
Chapter 3
Software
55
3.2.2.3 Locate
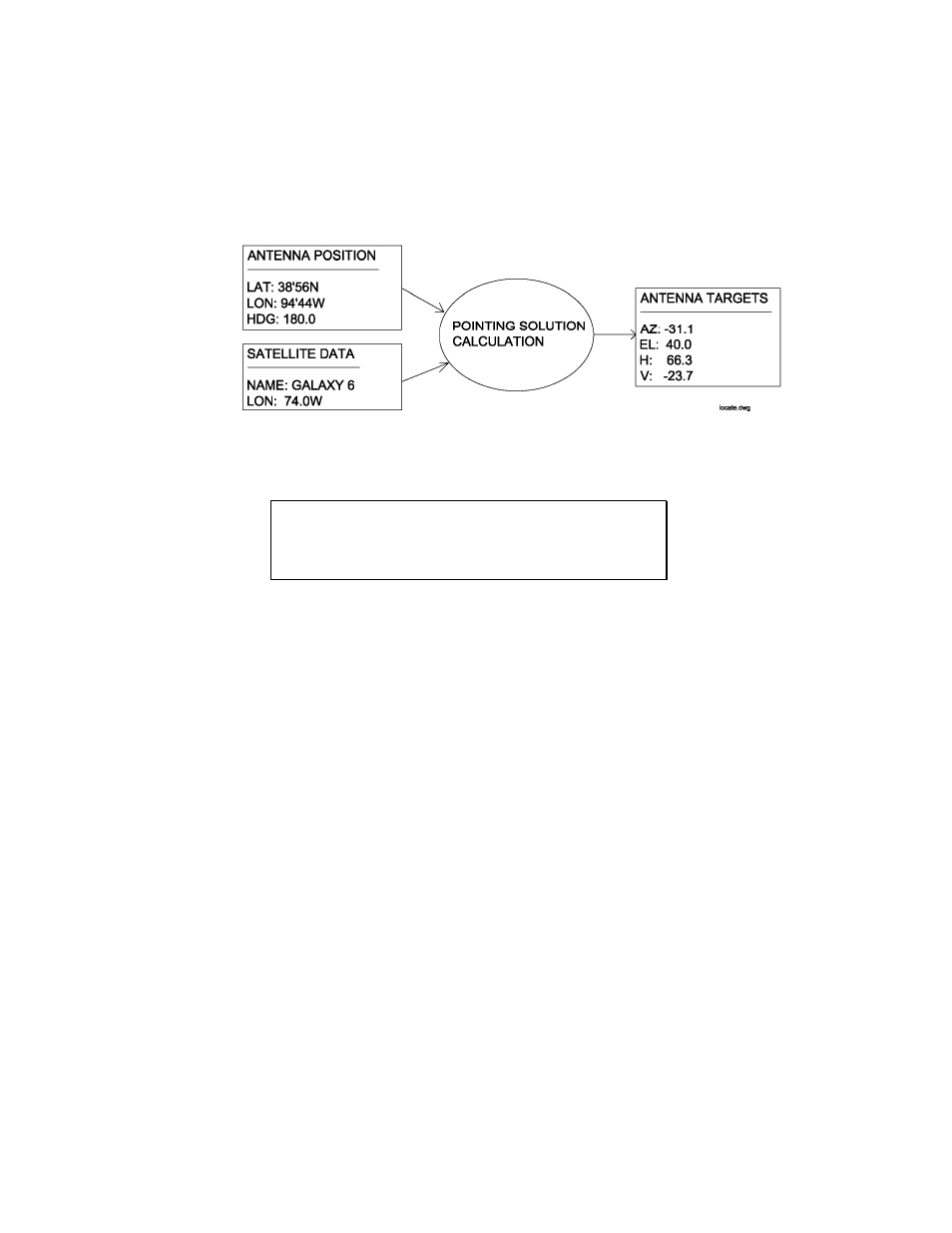
The LOCATE mode performs a calculation of the pointing angle (1.3.4) to a selected satellite based on
the RC4000’s estimate of where the antenna is positioned (lat/lon) and oriented (true heading). After the
calculation is performed the user may initiate an automatic antenna movement to locate the selected
satellite.
When the mode is first entered the following screen appears.
POS: 38
56N 9444W 180.0 LOCATE
SAT:GALAXY 6 74.0W AZ:-31.1
EL: 40.0
<1>SELECT NEW SAT READY TO LOCATE
POS: 38°56N 94°44W 180.0
The POS: field shows the RC4000’s current estimate of antenna position. If no estimate of antenna
position is available, the RC4000 will automatically attempt to obtain position information from the
navigation sensors (GPS receiver and fluxgate compass) if present.
Mount Position Initialization. In order to calculate a pointing solution, the RC4000 requires knowledge
of the mount’s “position”. The three components of mount position are latitude, longitude and true
heading.
The current latitude, longitude and true heading where the RC4000 believes the antenna is positioned is
displayed on the top line. The position data obviously affects the pointing angle that the RC4000
calculates and is displayed as a crosscheck for the user in case the vehicle has been moved and the
RC4000’s position has not been updated. If the lat/lon or heading data is not considered valid by the
RC4000, asterisks will be displayed in the appropriate field and the “parameter needed” message will be
triggered in the location readiness field.
The RC4000 polls the GPS receiver first to get latitude and longitude information. If no communication
with the GPS is received, the error message “GPS OFFLINE” will be displayed. In this case the interface
between the RC4000 and the GPS receiver would need to be checked. If the RC4000 is communicating
with the GPS receiver but the GPS indicates it has not yet been able to generate a valid lat/lon, then the
message “NAV NOT READY” will be displayed. The “NAV NOT READY” situation should not last for
more than a minute. If it does, then investigate whether or not the GPS receiver’s view of the sky is
blocked by buildings, etc.
If a valid lat/lon is received from the GPS then the lat/lon information will be displayed. Next the RC4000
will flash “MAGVAR” while it calculates the local magnetic deviation as a function of latitude, longitude
and time. After calculating the local magnetic variation, the RC4000 will poll the fluxgate compass for
magnetic heading information. The magnetic variation will be applied to the magnetic heading to form the
estimated true heading of the mount.