6 related parameters, 6related parameters – Yaskawa 1000 Series Drive Option - CANopen Technical Manual User Manual
Page 13
6 Related Parameters
YASKAWA ELECTRIC SIEP C730600 45B 1000-Series Option SI-S3 Technical Manual
13
6
Related Parameters
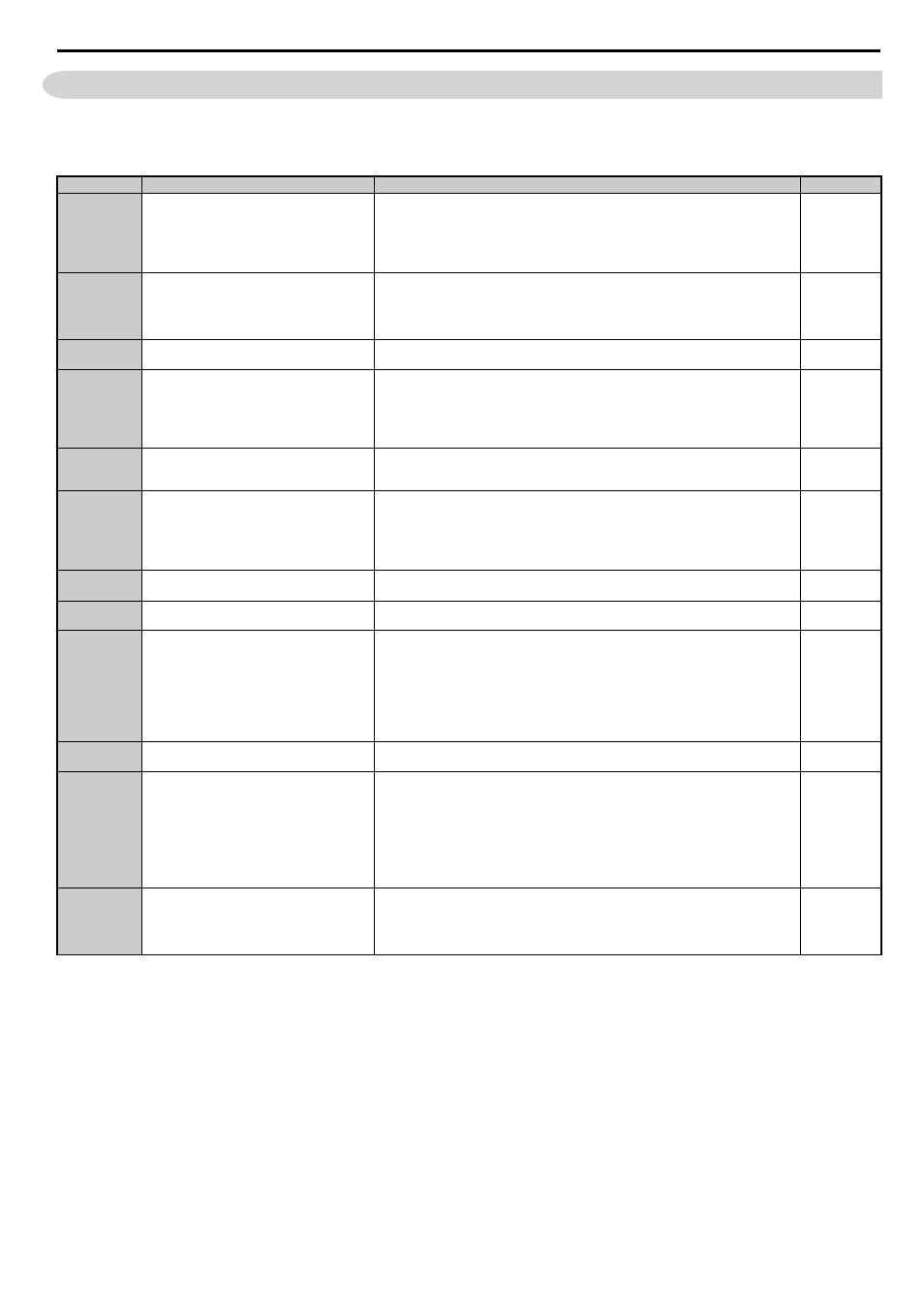
The following parameters are used to set up the drive for operation with the option.
Confirm proper setting of the all parameters in
before starting network communications.
Table 4 Related Parameters
No.
<1> To start and stop the drive from a CANopen master device using serial communications, set b1-02 to 3. To control the frequency reference of the drive via the master device, set b1-01 to
3.
<2> The default value depends on the drive used and the drive software version. For details refer to the technical manual for the drive.
<3> E2-04 is necessary to set up when the Drive Profile DSP402 objects are used.
<4> If set to 3, then the drive will continue to operate when an EF0 fault is detected. Take proper safety measures, such as installing an emergency stop switch.
<5> This parameter might not appear in certain drives. Furthermore its availability is limited to depending on the control mode selection. For details refer to the technical manual for the drive
the option card is used with.
<6> If the drive is set to receive the torque reference/limit from the network (F6-06 = 1) make sure the value is set appropriately by the controller. If no torque reference/limit value is entered
the motor will not produce torque.
<7> Power must be cycled in order to activate the setting after changes.
<8> All node addresses must be unique. If a node address is set to 0, then the ERR light will flash, and AEr will appear on the keypad screen to indicate that an address setting error has
occurred.
<9> Disabled in option card software versions up to 3101. Automatic bit rate detection is available in option card software versions 3102 and later.
<10> For the models CIMR-ACA, the default value is 0 when using the drive software version S1015 and later.
For the other models, the default value is 6.
<11> Changing o1-03 changes the units for input object 2010 (Hex) (frequency reference), output object 2110 (Hex) (output frequency) and 2200 (Hex) (motor speed). Furthermore o1-03
must be set to 2 and E2-04 must be set to the correct value in order to use the Drive Profile DSP402.
Name
Description
Default
b1-01
Frequency Reference Selection
Selects the frequency reference input source
0: Operator - Digital preset speed d1-01 to d1-17
1: Terminals - Analog input terminals
2: MEMOBUS/Modbus communications
3: Option card
4: Pulse Input (Terminal RP)
b1-02
Run Command Selection
Selects the run command input source
0: Digital Operator - RUN and STOP keys
1: Digital input terminals S
2: MEMOBUS/Modbus communications
3: Option card
1
E2-04
Motor 1 Motor Poles
Set the number of motor poles described on the motor nameplate.
2 to 48
4
F6-01
Operation Selection after Communications Error
Determines drive response when a bUS error is detected during communications with the
CANopen Option
0: Ramp to Stop
1: Coast to Stop
2: Fast-Stop
3: Alarm Only
1
F6-02
External Fault Detection Conditions (EF0)
Sets the condition for external fault detection (EF0)
0: Always detected
1: Detected only during operation
0
F6-03
Stopping Method for External Fault from
Communication Option Board
Determines drive response for external fault input (EF0) detection during CANopen
communication
0: Ramp to Stop
1: Coast to Stop
2: Fast-Stop
3: Alarm Only
1
F6-06
Torque Reference/Torque Limit selection from
Communications Option
0: Torque reference/torque limit via network communications are disabled.
1:
Torque reference/torque limit via network communications are enabled.
0
F6-07
NetRef/ComRef Selection Function
0: Multi-step speed reference disabled (F7 mode)
1: Multi-step speed reference allowed (V7 mode)
0
F6-08
Reset Communication Related Parameters
Determines if communication-related parameters are set back to their original default values
when the drive is initialized.
0: Do not reset F6- and F7- parameters when the drive is initialized using parameter
A1-03.
1: Rest F6- and F7- parameters when the drive is initialized using parameter A1-03.
Note: Setting this parameter does not affect communication-related parameters.
Setting this parameter only determines if communication-related
parameters (F6- and F7-) are also reset when A1-03 is used to
initialize the drive.
0
F6-35
Node Address
0 to 126
0
F6-36
Communication Speed
0: Automatic Bit Rate Detection
1: 10 kbps
2: 20 kbps
3: 50 kbps
4: 125 kbps
5: 250 kbps
6: 500 kbps
7: 800 kbps
8: 1 Mbps
o1-03
Digital Operator Display Selection
Sets the units to display the frequency reference and output frequency.
0: 0.01 Hz
1: 0.01% (100% = E1-04)
2: r/min (enter the number of motor poles to E2-04/E4-04/E5-04)
3: User defined by parameters o1-10 and o1-11