6 mechatrolink option drive parameters, 6mechatrolink option drive parameters – Yaskawa 1000 Series Drive Option - MECHATROLINK-II Technical Manual User Manual
Page 14
14
YASKAWA ELECTRIC SIEP C730600 50A YASKAWA AC Drive-Option Card MECHATROLINK-II Technical Manual
6 MECHATROLINK Option Drive Parameters
6
MECHATROLINK Option Drive Parameters
Confirm proper setting of the all parameters in
before starting network communications.
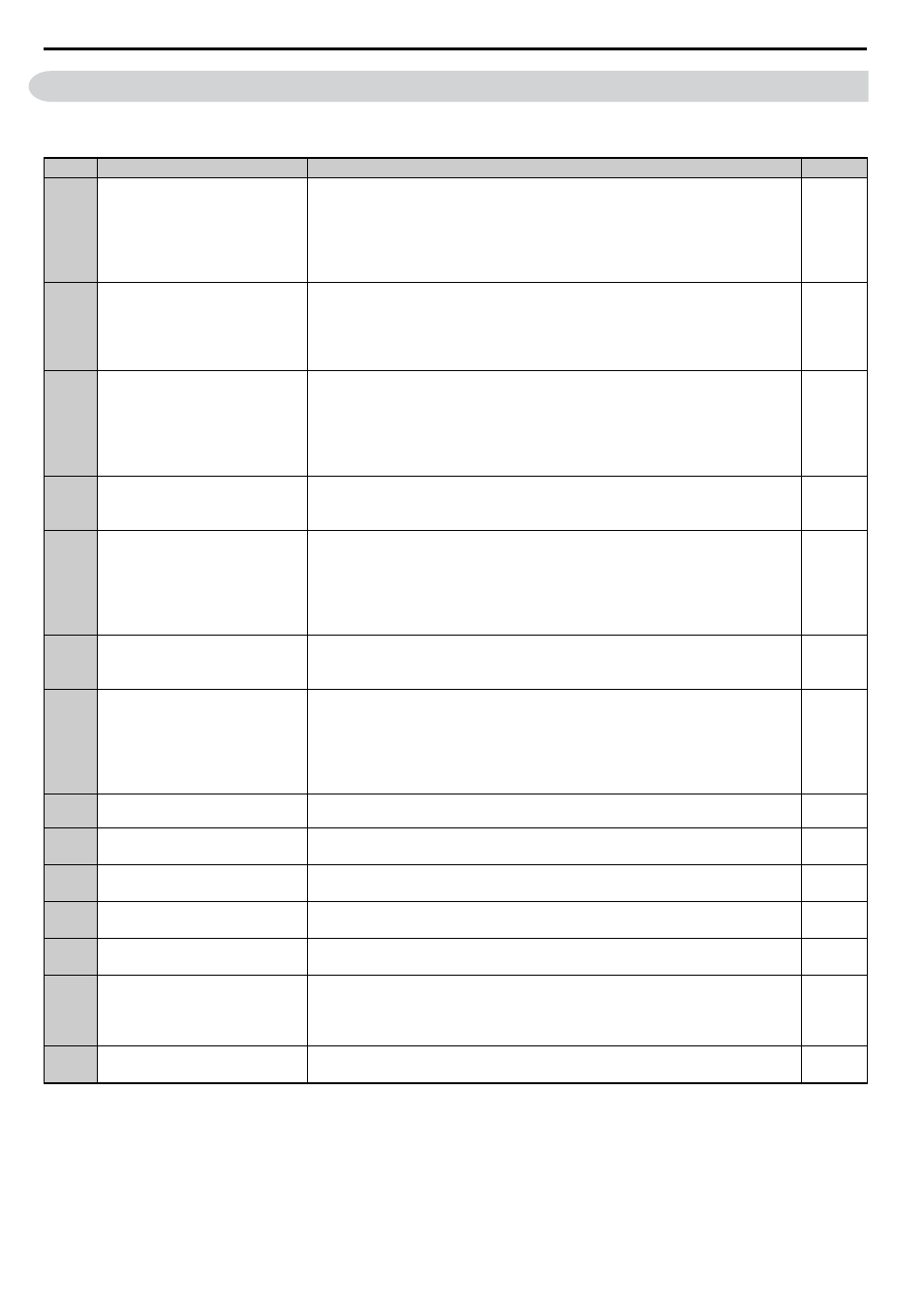
Table 4 Parameter Settings
No.
<1> To start and stop the drive with the MECHATROLINK master device using serial communications, set b1-02 to 3. To control the frequency
reference of the drive via the master device, set b1-01 to 3.
<2> If set to 3, then the drive will continue to operate when a fault is detected. Take proper measures such as installing an emergency stop switch.
<3> Power must be cycled in order for any setting changes to take affect.
<4> All station addresses must be unique. If set to 20 or 3F, a Station Address Error (AEr) will occur and the ERR light will turn on.
<5> Setting byte 10 of INV_CTL to 0EH enables the register set by F6-23. Byte 11 and 12 of the response data enable the register content set by
F6-23.
<6> Setting byte 10 of INV_CTL to 0FH enables the register set by F6-24. Byte 11 and 12 of the response data enable the register content set by
F6-24.
Name
Description
Default
b1-01
Frequency Reference Selection 1
Selects the frequency reference input source
0: Operator - Digital preset speed d1-01 to d1-17
1: Terminals - Analog input terminal A1 or A2
2: MEMOBUS/Modbus communications
3: Option PCB
4: Pulse Input (Terminal RP)
1
b1-02
Run Command Selection 1
Selects the run command input source
0: Digital Operator - RUN and STOP keys
1: Digital input terminals S1 to S8
2: MEMOBUS/Modbus communications
3: Option PCB
1
F6-01
Communications Error Operation
Selection
Determines drive response when a bUS error is detected during communications with
the MECHATROLINK-II Option
0: Ramp to Stop. Decelerate to stop using the deceleration time in C1-02.
1: Coast to Stop
2: Fast-Stop. Decelerate to stop using the deceleration time in C1-09.
3: Alarm Only
1
F6-02
External Fault from Comm.
Option Detection Selection
Sets the condition for external fault detection (EF0)
0: Always detected.
1: Detection during run only.
0
F6-03
External Fault from Comm.
Option Operation Selection
Determines drive response for external fault input (EF0) detection during
MECHATROLINK-II communication
0: Ramp to Stop. Decelerate to stop using the deceleration time in C1-02.
1: Coast to Stop
2: Fast-Stop. Decelerate to stop using the deceleration time in C1-09.
3: Alarm Only
1
F6-07
Multi-Step Speed Enable/Disable
Selection when NetRef/ComRef is
Selected
0: Multi-step speed reference disabled (Same as F7)
1: Multi-step speed reference enabled (Same as V7)
0
F6-08 Reset Communication Parameters
Determines which communication-related parameters are set back to their original
default values when the drive is initialized.
0: Do not reset F6- parameters when the drive is initialized using parameter A1-03.
1: Rest F6- parameters when the drive is initialized using parameter A1-03.
Note: Setting this parameter does not affect communication-related
parameters.
0
F6-20
MECHATROLINK Station Address 20 to 3FH
21
F6-21
MECHATROLINK Frame Size
0: 32 byte
1: 17 byte
0
F6-22
MECHATROLINK Link Speed
0: 10 Mbps
1: 4 Mbps
0
F6-23
MECHATROLINK Monitor
Selection (E)
0 to FFFFH
0
F6-24
MECHATROLINK Monitor
Selection (F)
0 to FFFFH
0
F6-25
Operation Selection at Watchdog
Error (E5)
0: Ramp to stop. Decelerate to stop using the deceleration time in C1-02.
1: Coast to stop.
2: Fast Stop. Decelerate to stop using the deceleration time in C1-09.
3: Alarm only.
1
F6-26
MECHATROLINK bUS Errors
Detected
Sets the number of option communication errors (bUS).
2 to 10
2