Status, Status field – Yaskawa 1000 Series Drive Option - MECHATROLINK-II Technical Manual User Manual
Page 28
8 MECHATROLINK-II Commands
28
YASKAWA ELECTRIC SIEP C730600 50A YASKAWA AC Drive-Option Card MECHATROLINK-II Technical Manual
The SEL REF3/4 sub-command is used to select the contents of REF3 with bits 0 to 3, and select the contents of REF4
with bits 4 to 7.
The SEL REF5/6 sub-command is used to select the contents of REF5 with bits 0 to 3, and select the contents of REF6
with bits 4 to 7.
Refer to
for detail on the selection range for SEL REF 3 to 6.
The SEL MON3/4 sub-command is used to select the contents of MON3 with bits 0 to 3, and select the contents of
MON4 with bits 4 to 7.
The SEL MON5/6 sub-command is used to select the contents of MON5 with bits 0 to 3, and select the contents of
MON6 with bits 4 to 7.
Refer to
for detail on the selection range for SEL MON 3 to 6.
In the following cases, a warning is generated and the command is ignored.
• If not in phase 2 or 3: Command warning (A.95)
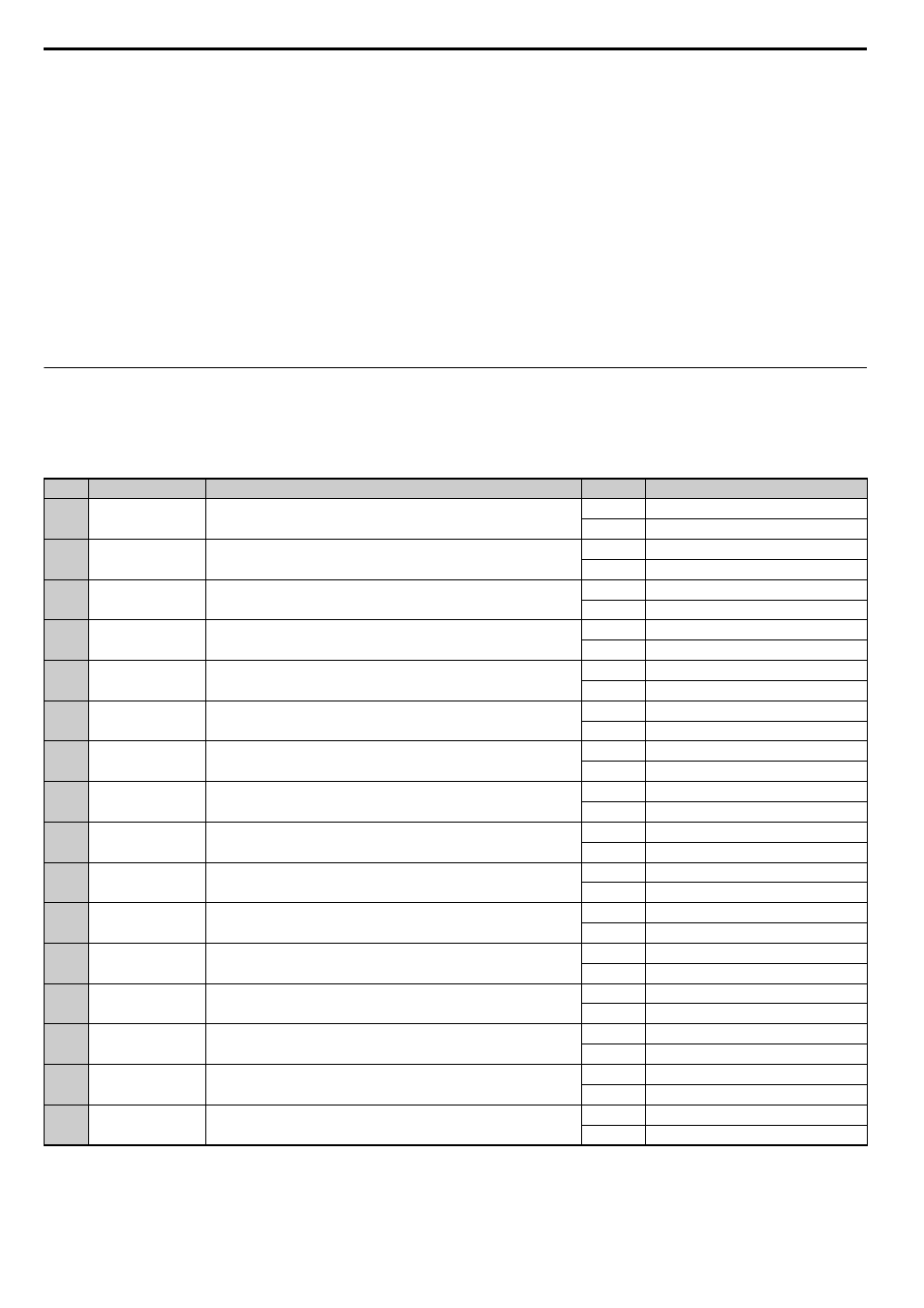
Status
This section describes the STATUS field for main commands and the SUBSTATUS field for sub-commands.
STATUS Field
Note: With the PRM_RD command, only the settings for the STATUS (CMDRDY) is valid. Other bits are not used.
Bit
Name
Description
Value
Setting
0
ALM
Alarm (fault) status
0
No alarm
1
Alarm (fault)
1
WARNG
Warning status
0
No warning
1
Warning
2
CMDRDY
Command ready
0
Busy
1
Ready
3
BB OFF
Baseblock OFF (OFF when output voltage is being output from
the drive or during baseblock.)
0
Baseblock ON
1
Baseblock OFF
4
PON
Main power supply ON (OFF during undervoltage)
0
Main power supply OFF
1
Main power supply ON
5
RUNX
Running
0
–
1
Running
6
0SP
Zero speed
0
–
1
Zero speed
7
REV
Reverse RUN
0
Forward RUN
1
Reverse RUN
8
RESET
Fault reset signal input
0
–
1
Fault reset signal input
9
AGREE
Speed agreement
0
–
1
Speed agreement
A
INV_READY
Drive ready
0
–
1
Drive ready
B
OPE
oPE fault
0
–
1
oPE fault
C
UV_R
Recovery after power loss or recovery after momentary power
loss
0
Recovery after power loss
1
Recovery after momentary power loss
D
REMOTE
Local or Remote
0
Local
1
Remote (Transfer)
E
SEL_M
Motor Selection
0
Motor 1
1
Motor 2
F
0_SERVO
Zero Servo Complete
0
–
1
Zero Servo complete