Yaskawa Motion Control G7 Drive Software User Manual
Page 17
Date: 05/16/08, Rev: 08-05
Page 17 of 38
TM.G7SW.117
5.3
Encoders:
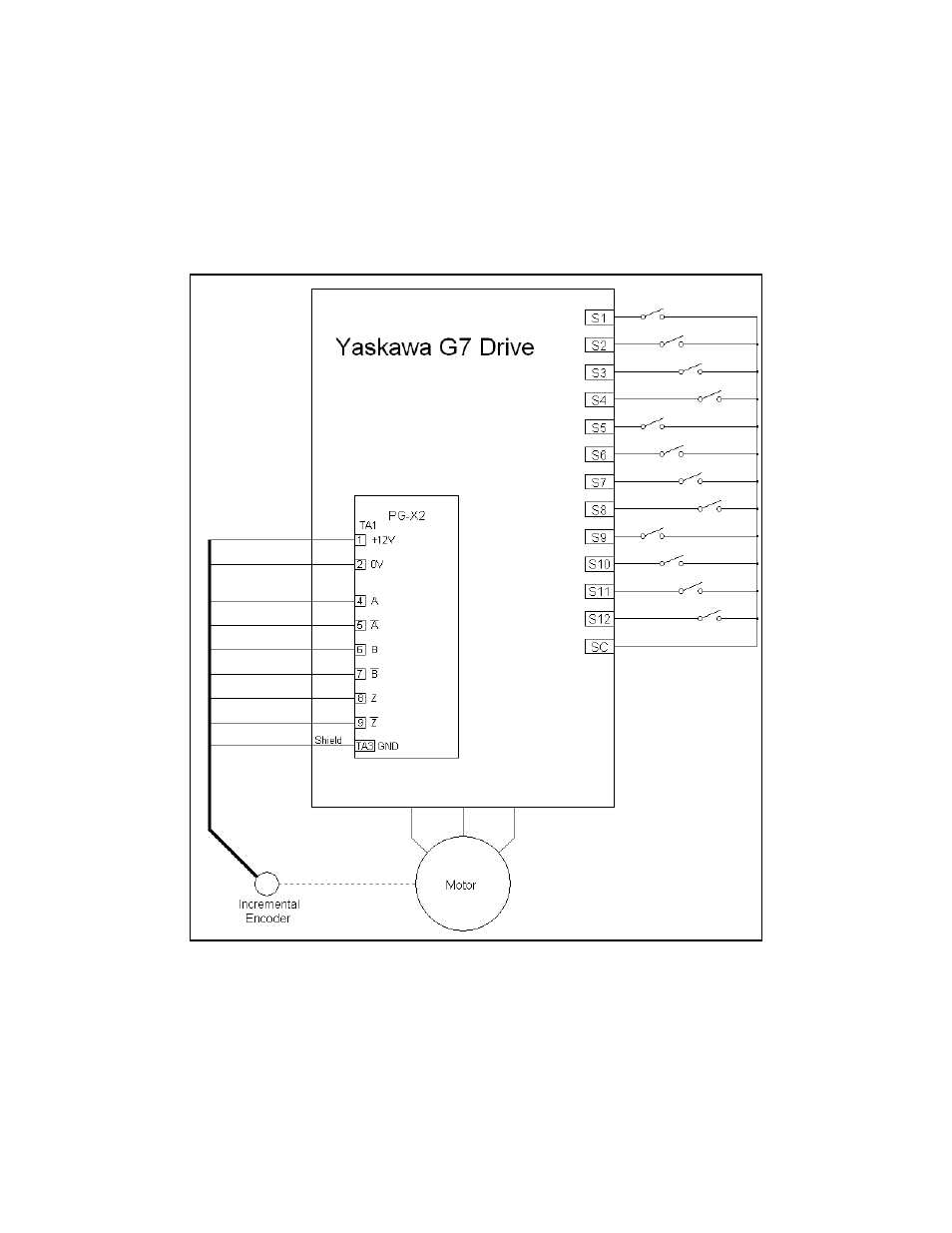
SINGLE INCREMENTAL ENCODER: The encoder used for positioning is mounted to the motor and serves two
purposes. One is to provide velocity feedback for the Flux Vector control method and the other is to provide
position information to the motion control software. In order for this to work, there needs to be a “positive drive”
setup, such as a direct-coupled gear box or a cogged timing belt between the motor and the load. When this
scheme is employed, there is no compensation for backlash or slack in the mechanical system. The drive requires
one of the following encoder feedback cards: PG-X2, PG-B2 or PG-W2.
Note:
Wiring for the encoder marker pulse (Z+ and Z-) is only required if using a “Homing w/marker” homing
routine (P2-01 = 4 or 5).
Figure 4: Single Incremental Encoder Wiring (P3-01 = 0)