Yaskawa Motion Control G7 Drive Software User Manual
Page 28
Date: 05/16/08, Rev: 08-05
Page 28 of 38
TM.G7SW.117
MANUAL HOME: When this homing method is selected, whatever position the drive is in when a rising edge of the
home switch is detected is considered home. A “move to home at end of homing routine” is not performed in this
mode. If a rising edge of the home switch is detected during a move, the position at the rising edge becomes the
new home and the move is canceled.
HOME OFFSET: Sometimes it is desirable to have the home (zero) position at a different place than the home
switch. The home offset parameters store the distance between the home switch position and the desired actual
home position.
MOVE TO HOME AT END OF HOMING ROUTINE: When a homing routine is complete, the drive completes a
move to the newly found home position (home switch + home offset). The speed of the move is determined by
parameter d1-08, and uses parameters C1-01 and C1-02 as the accel and decel rates. The “Homing Needed” and
“Home Complete” digital outputs will change as soon as the move to home is complete.
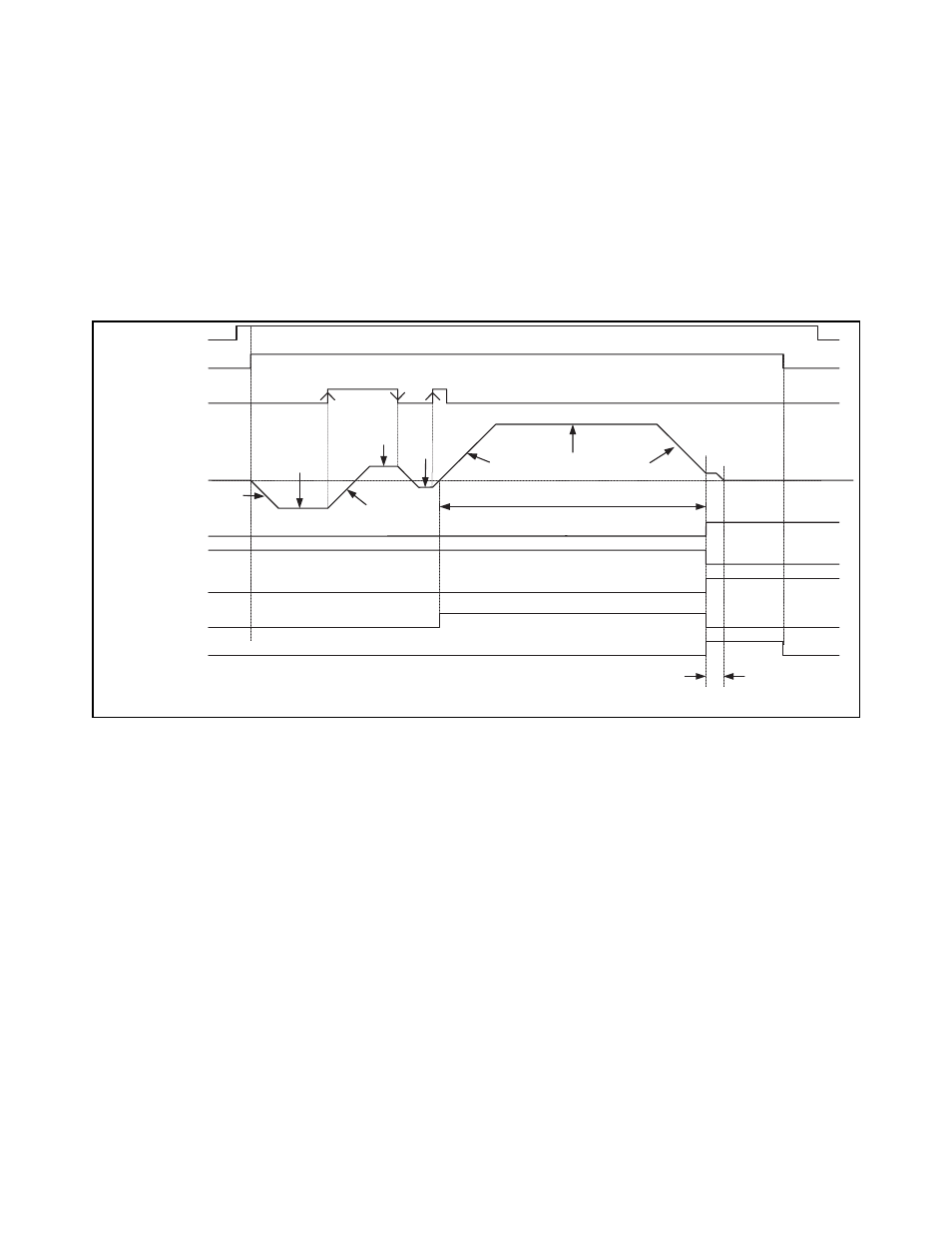
Figure 17: Home Negative with Backup plus home offset (P2-01 = 1 and P2-06 > 0)
Digital
Inputs
Motor
Speed
Digital
Outputs
Run Cmd
Home Cmd
During Move
Move Complete
C1-07
In Position
Window
(P1-08)
0 Hz
Home Switch
Homing Needed
At Home
Homing
Complete
C1-08
(-)P2-02
(+)P2-03
(-)P2-04
d1-08
C1-01
C1-02
Move To Home
+ Home Offset