Yaskawa Motion Control G7 Drive Software User Manual
Page 22
Date: 05/16/08, Rev: 08-05
Page 22 of 38
TM.G7SW.117
5.4
Motion and Velocity Profile:
COMMANDED POSITION: The commanded position is determined by the multifunction inputs and by the setting
of parameter P1-02.
MOVE VELOCITY: The speed of the move is determined by one of the “d1” parameters, as shown in Table 1. The
drive will attempt to perform a trapezoidal move. If due to the accel and decel rates, move velocity and commanded
position the drive cannot reach the full move velocity, the move will be triangular. If an alternate frequency
reference or jog is commanded via multifunction inputs during a move, the drive will run at the new commanded or
jog speed until it is no longer activated, at which time the move will be canceled, and the drive will ramp to zero
speed. The position is tracked when operating at an alternate commanded frequency reference or in local mode. If
the internal register that tracks position (or position + home offset) exceeds 10
9
encoder counts, the drive /
machine will need to be re-homed. If motion control is disabled (either via parameter P1-01 or the “Motion Disable”
multifunction input), the drive no longer tracks position and may need to be re-homed depending on encoder type
and move type.
POSITIONING ROUTINE: When a move is commanded, the drive will accelerate on the selected acceleration
ramp up to the commanded move velocity. During this time the drive is calculating both when to start the
deceleration ramp and the optimum positioning speed, based on the current position, current velocity, selected
decel rate and position regulator gain. When the “begin decel” point is reached, the drive’s speed reference will be
clamped at the calculated positioning speed and the drive will decelerate on the selected deceleration ramp. Once
the machine speed is at or below the positioning speed, the speed will be completely controlled by the position
regulator, with a speed limit of positioning speed. When the machine then enters the “In Position” window and the
motor speed is below the DC injection start frequency (b2-01), the “In Position” digital output is activated and the
drive seeks to resolve all position errors.
A run command must be present prior to commanding a move. If the move is commanded before the run
command, the move command is ignored and the drive remains at zero speed. If the run command is removed
during a move, parameter b1-03 determines the stopping method. If the stopping method is “Ramp To Stop,” the
decel rate used is the one selected at the beginning of the move.
The motion and velocity profile is latched in at the beginning of the move. If the position, velocity or accel/decel is
changed during the move, it will be ignored until the next move command is given.
If an absolute move is commanded before the drive has been homed, a warning is displayed (RHS Run Homing
Sequence) and the drive remains at zero speed.
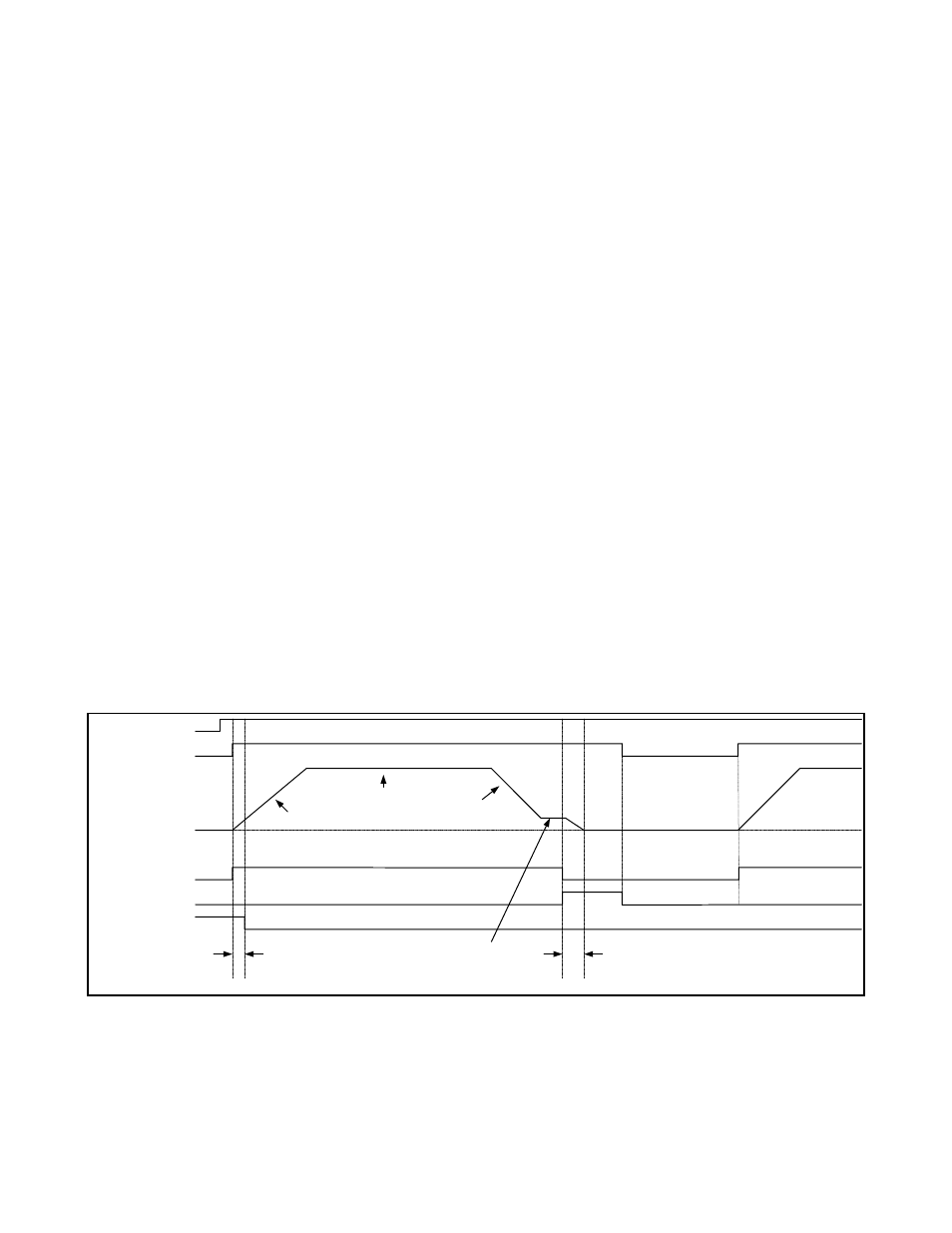
Figure 8: Typical move profile from “home” to a positive position, maintained move command (P1-03 = 0)
Digital
Inputs
Motor
Speed
Digital
Outputs
Run Cmd
Move Cmd
During Move
Move Complete
At Home
Selected
Accel
Rate
Selected
Decel
Rate
Selected
Max.
Speed
In Position
Window
(P1-08)
In Position
Window
(P1-08)
Positioning
Speed
(Determined
Automatically)
0 Hz
60 Hz