Yaskawa Motion Control G7 Drive Software User Manual
Page 33
Date: 05/16/08, Rev: 08-05
Page 33 of 38
TM.G7SW.117
5.9
Pre-Action:
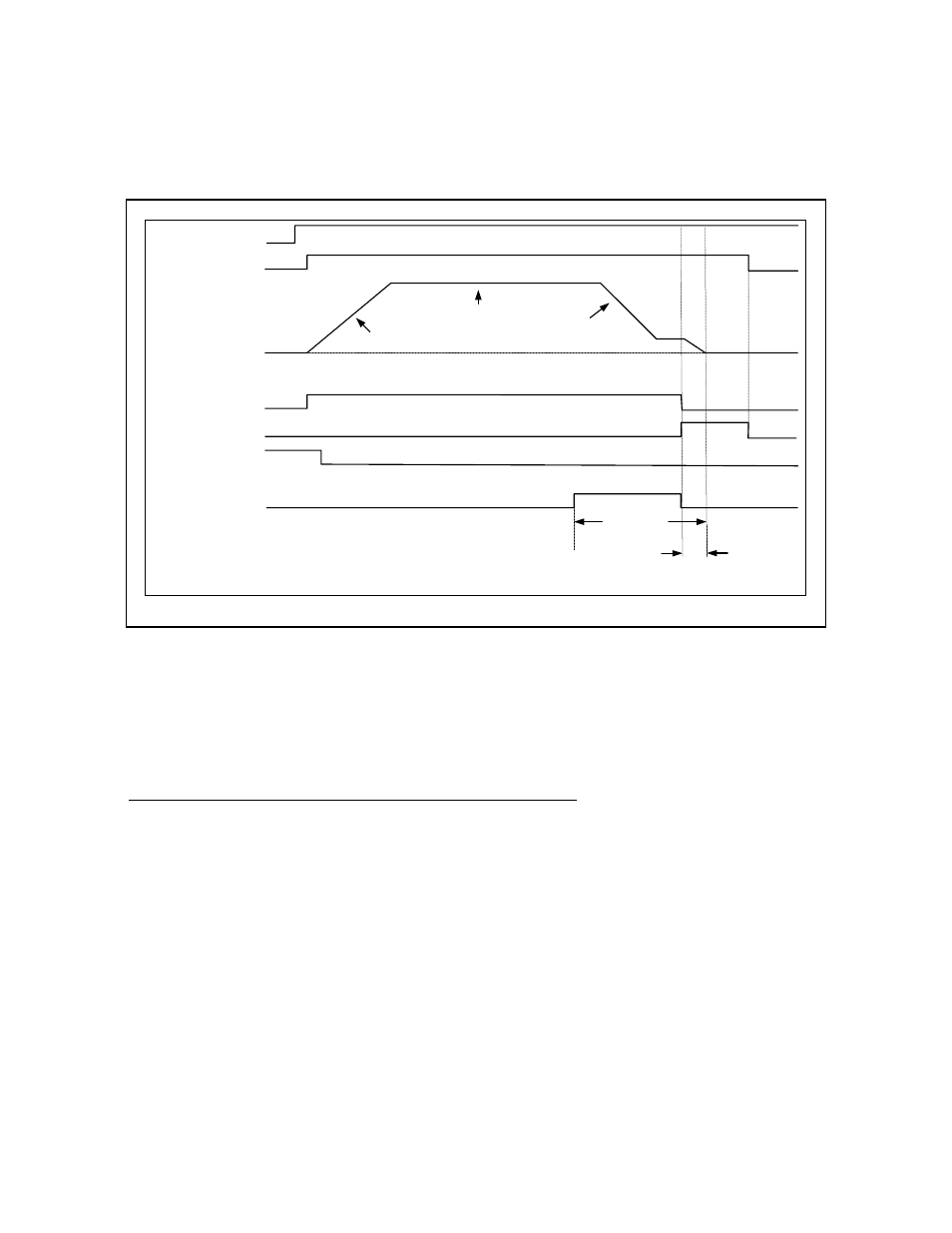
This function allows a digital output to indicate when the machine is a given distance (set by P2-08) from its
destination during a move. The “Pre-Action” digital output (H2-0X = 46) closes when distance from commanded
destination is less than distance indicated in parameter P2-08 AND there is a move in progress. It will open when
distance from commanded destination is less than in position window (P1-08) or the move is canceled.
Figure 22: Pre-Action Digital Output
5.10 32-bit Position Command
A 32-bit position can be commanded by setting parameter P1-02 = 3 and loading the desired position into Modbus
registers 061Ch and 061Dh. See Example 1 below for the calculations involved. The position command is NOT set
in engineering units (P1-09), but instead in encoder quadrature counts (encoder PPR * 4). Multi-step distance
selections will override this position command (see Table 1).
Example 1- Split a 32-bit position reference into two 16-bit words:
Desired Position Reference: 10,234,567 encoder counts
Step 1: Divide the position reference by 65,536 and drop the remainder (decimal portion).
Position Reference / 65,536 = 10,234,566 / 65,536 = 156.17
→
156
Step 2: Multiply the result of Step 1 by 65,536.
Step 1 result * 65,536 = 156 * 65,536 = 10,223,616
Step 3: Subtract the result of Step 2 from the desired position reference.
Position Reference - Step 2 Result = 10,234,567 - 10,223,616 = 10,951
Low Word (061Ch) = Step 3 Result = 10,951
High Word (061Dh) = Step 1 Result = 156
Note: Negative numbers can be entered as the two’s compliment.
Digital
Inputs
Motor
Speed
Digital
Outputs
Run Cmd
Move Cmd
During Move
Move Complete
At Home
Selected
Accel
Rate
Selected
Decel
Rate
Selected
Max.
Speed
In Position
Window
(P1-08)
0 Hz
60 Hz
Pre-Action
Distance
(P2-08)
Pre-Action