Yaskawa Motion Control G7 Drive Software User Manual
Page 31
Date: 05/16/08, Rev: 08-05
Page 31 of 38
TM.G7SW.117
HOMING WHEN USING AN ABSOLUTE INCREMENTAL ENCODER: This software was designed around a “TR
Electronic” brand encoder model #: CD65M-G/S-4096/4096-D23BB-R10NR/N7. Please consult Yaskawa if
another brand / model number of encoder is used. When P3-01 = 3 or 4 (Absolute Incremental Encoder), and the
drive is first powered up, it reads the actual position from the serial encoder as follows:
1. Homing begins by the drive closing its “Position Request” output to the encoder using the analog output
on terminal FM. This will occur automatically at drive power-up or when the “Home Command” digital
input is closed.
2. The encoder responds by closing its “Drive Disable” output to the drive. This signal is run into the
analog input terminal A2 or A3. The drive will then not operate as long as the “Drive Disable” is high, as
the encoder will not work in its incremental mode. The drive will then clear its pulse counter registers. At
this time the “SENCR – Serial Encoder Reading” warning will flash on the display.
3. When the drive is ready to begin counting its absolute position, it opens the “Position Request” output to
the encoder. The encoder will then output its absolute position by sending the number of pulses it is
from its zero count. The drive will count the pulses in quadrature. The drive will also monitor the
direction (phase) of the A and B channels. If, during the sending of the absolute position, the encoder is
rotated, the encoder may need to subtract pulses to relate its position by reversing the polarity of the A
and B channel phasing.
4. When the encoder has relayed its exact position to the drive, the encoder will open its “Drive Disable”
output telling the drive to use the pulse count at that time as the absolute position. The drive will clear
the base-block and begin looking at the encoder for incremental feedback.
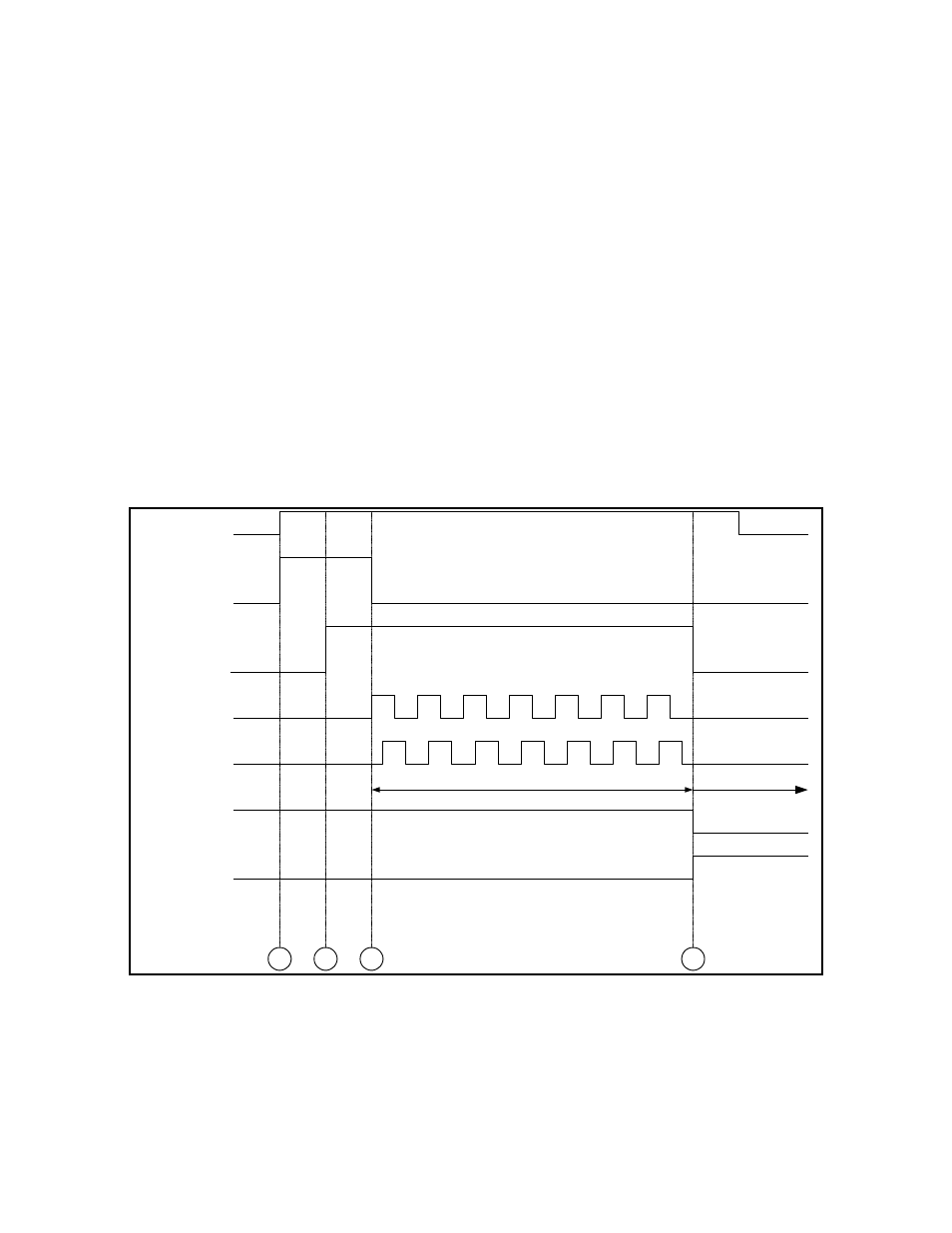
Figure 21: Absolute Incremental Encoder Homing Routine
0 V
10 V
12 V
0 V
Digital Input
Home Command
Analog Output (AM or FM)
Serial Enc. Pos. Req.
H4-0X = 99
Analog Input (A2 or A3)
Serial Enc. Drv. Dis.
H3-0X = 20
Encoder Channel
A + & A -
Encoder Channel
B + & B -
Digital Output
Homing Needed
Digital Output
Homing Complete
Load Absolute
Position
Incremental
Mode
1
2
3
4