4 related parameters and functions – Yaskawa AC Drive - A1000 Motion Control Custom User Manual
Page 16
4 Related Parameters and Functions
16
YASKAWA TM.A1000SW.117 Motion Control Custom Software Supplement
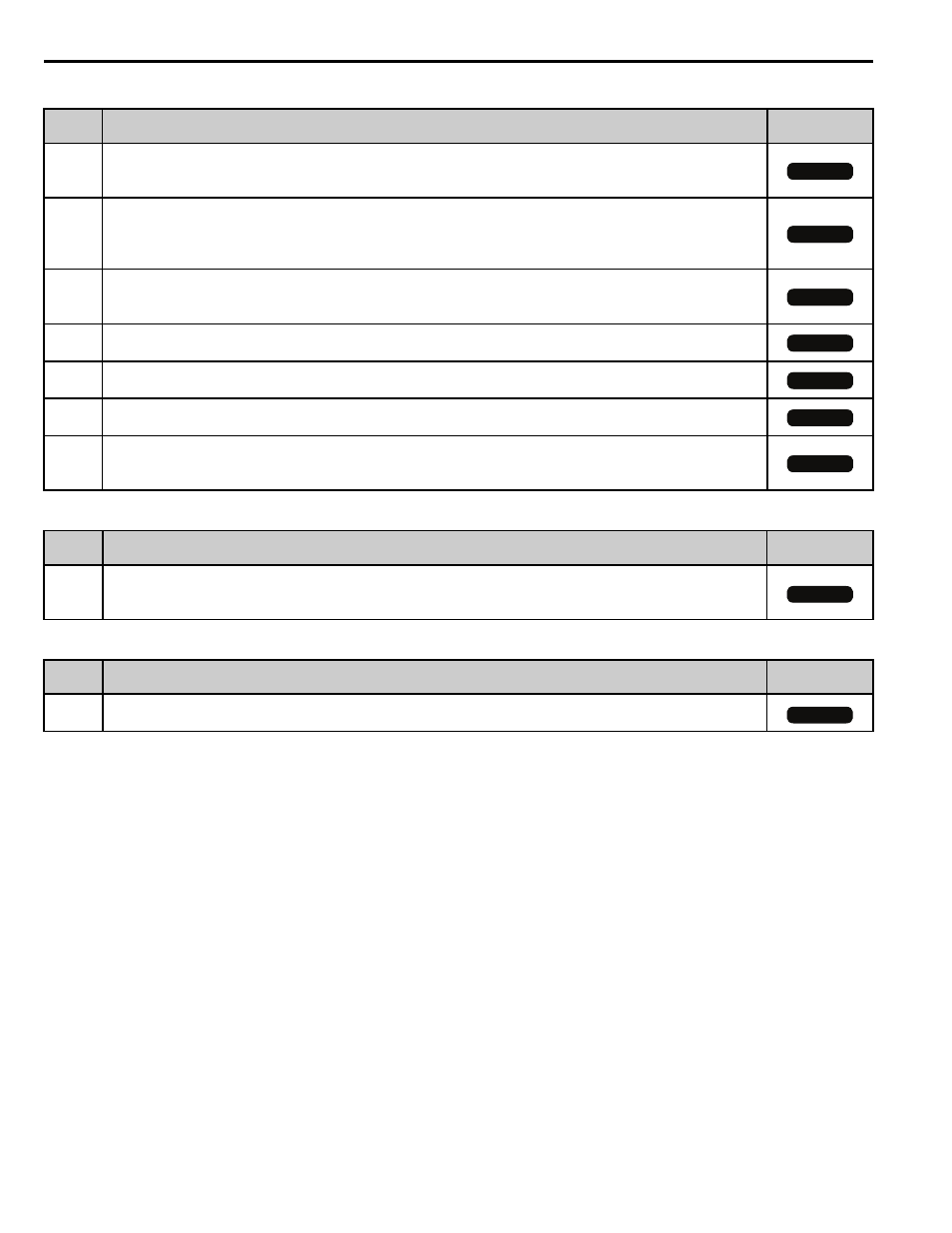
Table 10 Multi-Function Digital Output Settings (H2-
Table 11 Multi-Function Analog Input Settings (H3-
Table 12 Multi-Function Analog Output Settings (H4-
Setting
Description
Control Mode
Access Level
40
Move In Progress
Closed: Drive is completing the specified move profile. Deactivates at the end of a move when machine is within the
specified in position window and the motor speed is below the DC Injection at start frequency (B2-01).
41
Move Complete
Closed: Move routine is complete and is within the specified in position window and motor speed is below the DC
Injection start frequency. Deactivates when the move command is removed. If a momentary move command is
utilized (P1-03 = 1 or 2), this output deactivates when another move command is given.
42
Homing Complete
Closed: A homing routine has been completed. The drive knows its position relative to the home switch, and has
moved to the home + home offset position (P2-06).
43
Homing Needed
Closed: A successful homing routine has not been completed.
44
At Home
Closed: The drive is within +/- the in position of home (home + home offset).
45
Learn Successful
Closes when the drive has successfully learned the present position. Opens when the learn command is removed.
46
Pre-Action
Closes when distance from commanded destination is less than parameter P2-08. Opens when distance from
commanded destination is less than parameter P1-08. Deactivates when the move command is removed.
Setting
Description
Control Mode
Access Level
20
Ser Enc Drv Dis (Absolute Incremental Encoder Drive Disable)
Used by the absolute incremental encoder to disable the drive when transferring
position information.
Setting
Description
Control Mode
Access Level
710
Ser Enc Pos Req (Absolute Incremental Encoder Position Request)
The drive outputs a 10V signal to the absolute encoder to begin the position request routine.
OLV
CLV
OLV
CLV
OLV
CLV
OLV
CLV
OLV
CLV
OLV
CLV
OLV
CLV
All Modes
All Modes