Yaskawa AC Drive - A1000 Motion Control Custom User Manual
Page 26
5 Function Description
26
YASKAWA TM.A1000SW.117 Motion Control Custom Software Supplement
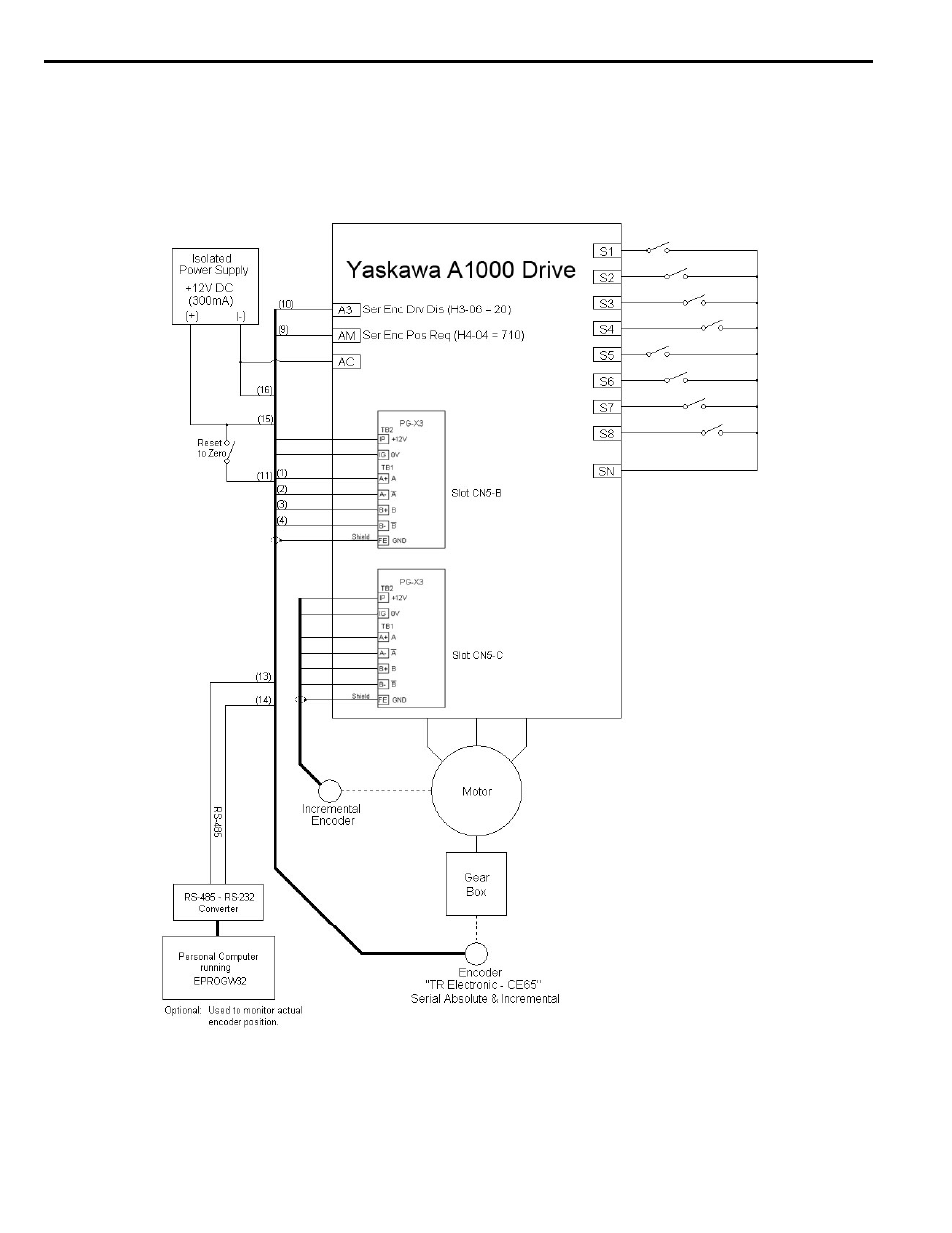
Absolute Incremental Encoder w/Separate Incremental Encoder
For use with a TR-electronic, series CE-65 serial (ISI) encoder. The drive must read the actual position of the serial
encoder upon power up,. This process usually is completed within a few seconds. As an option, the encoder can be
monitored and configured directly using a PC, an RS-232 to RS-485 converter, and the TR Electronic EPROGW32
program.
Figure 8
Figure 8 Absolute Incremental Encoder Wiring - Dual Encoders (P3-01=4)
Note: 1. The wiring above is for a TR Electronic brand encoder model #: CE65M-G-4096/4096-D23BB-R10HR/HX.
4096 counts/rev, +/-2048 revolutions (multi-turn)
2. Change the terminal AM gain (H4-05) from the default setting of 50.0% to 200.0% when using terminal AM for the Serial
Encoder Position Request (H4-04 = 710). Otherwise, the serial encoder read request will fail and a SENCF (Serial Encoder
Fault) will occur.