TE Technology TC-36-25-RS485 User Manual
Page 26
26
2.5
CONTROL MODE
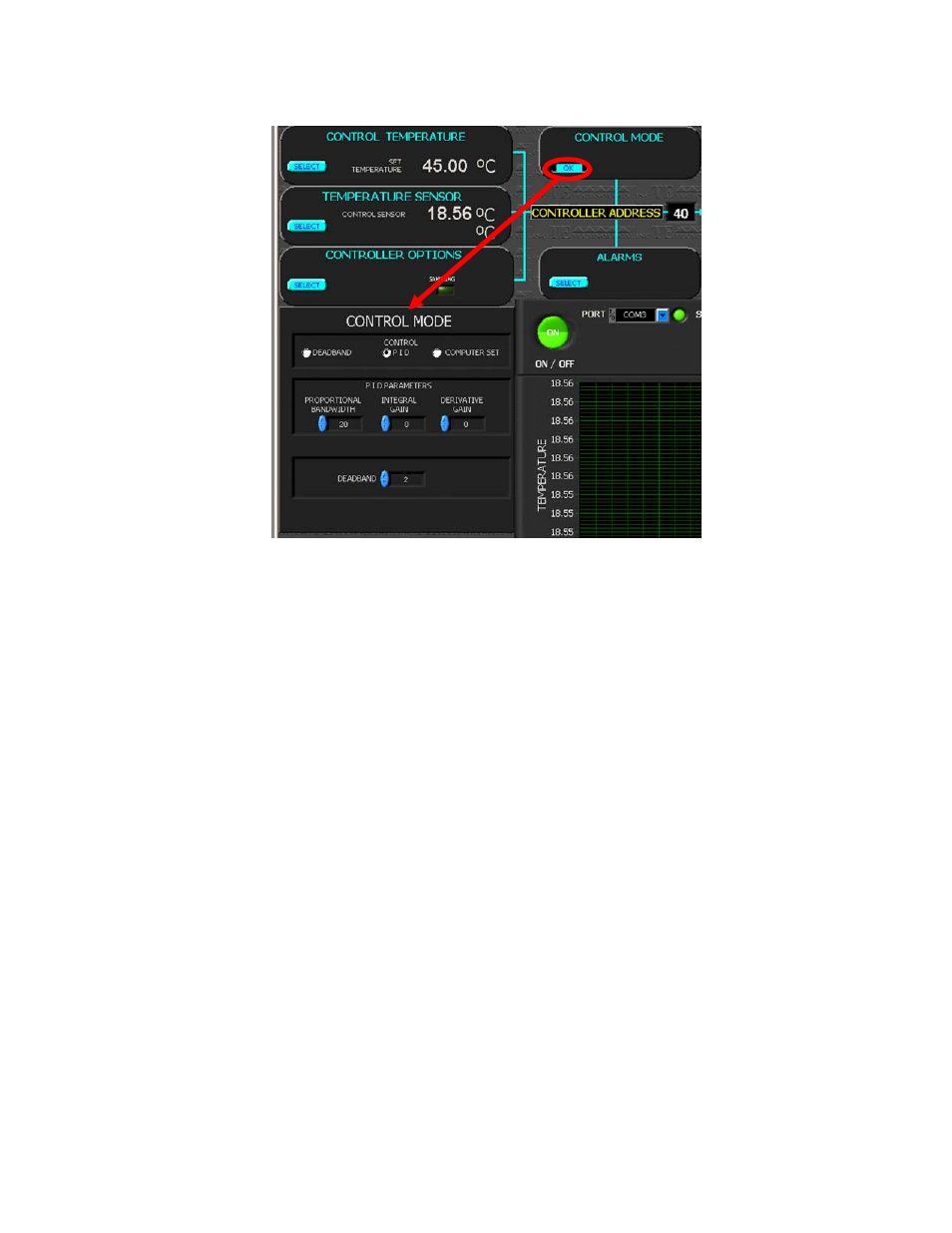
2.5.1 CONTROL MODE
The CONTROL MODE determines how the controller will attempt to obtain set point stability:
a) PID CONTROL: The controller uses proportional/integral/derivative control. When this mode is selected, the
temperature controller compares the actual temperature to the set temperature and automatically adjusts
the output power accordingly. The output power is a function of the primary temperature sensor feedback
and the PID PARAMETERS (Section 2.5.2).
b) COMPUTER CONTROL: This enables the user to select a constant, fixed‐duty‐cycle output (a fixed percentage
output). This applies when the COMPUTER option under the SET TEMPERATURE BY section is selected; see
section 2.2.1 for further details.)
c) DEADBAND CONTROL: This causes the controller to behave much like a mechanical thermostat. DEADBAND
CONTROL should not be used unless care is taken to prevent the TE device from being damaged by excessive
thermal cycling.
2.5.2 PID PARAMETERS
PROPORTIONAL BANDWIDTH:
The acceptable bandwidth values that may be entered are (1 to 100) degrees.
The proportioning bandwidth is the temperature span over which the output power is proportioned from ‐100% to
+100%. The bandwidth is centered about the temperature set point, and once set the proportional output will
vary as the actual temperature moves through the bandwidth range. That is, the controller output is +100% at the
end of the bandwidth range above the set point, it decreases to 0% power as it reaches the set point, and then
reverses to ‐100% as it reaches the end of the bandwidth range below the set point.
For example, suppose the controller is being operated in the cooling mode, the set point is 10.0 °C, and the
bandwidth is set to 5 °C (with INTEGRAL GAIN and DERIVATE GAIN both set to zero). The controller will be at
+100% output until the temperature cools to 12.5 °C. Power then starts to proportionally decrease as the sensor
temperature is cooled below 12.5°C. The power will be reduced to 0% when the sensor is at 10.0 °C. Finally, the
power will reverse polarity and proportionally increase to ‐100% if the sensor temperature decreases to 7.5°C.