Yaskawa P7 to P1000 User Manual
Page 27
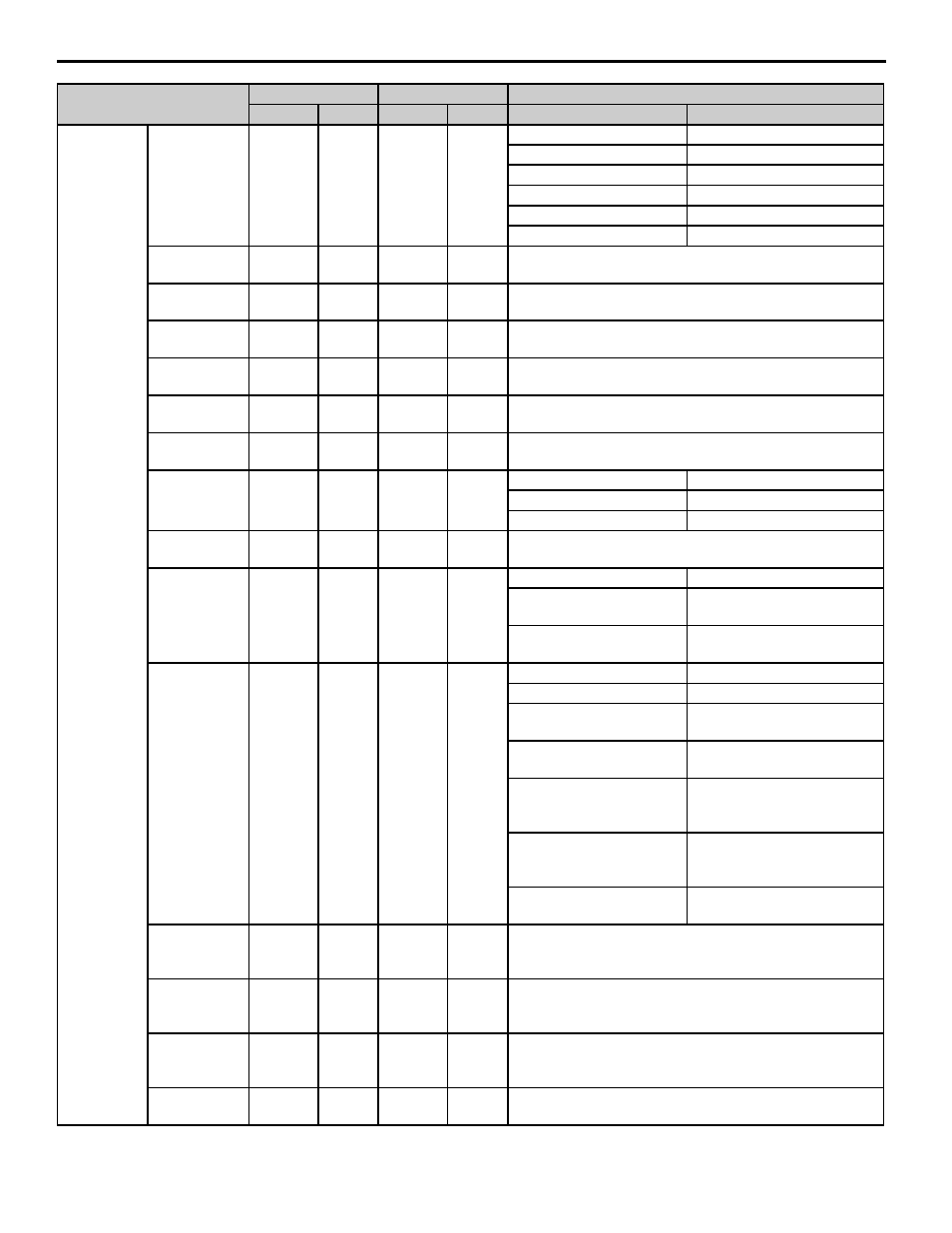
13 Appendix 2 Parameter Cross Reference
YASKAWA PL.P1000.01 P7 to P1000 - Product Transition Guide
27
PID Control
PID Control
Method
Selection
b5-01
0
b5-01
0
b5-01
b5-01
0: Disabled
0: Disabled
1: D = feedback
1: Enable
2: D = feed-forward
—
3: Ref. + PI
—
—
—
Proportional
Gain Setting (P)
b5-02
1.00
b5-02
1.00
—
Integral Time
Setting (I)
b5-03
1.0 s
b5-03
1.0 s
—
Integral Limit
Setting
b5-04
100.0%
b5-04
100.0%
—
PID Output
Limit
b5-06
100.0%
b5-06
100.0%
—
PID Offset
Tuning
b5-07
0.0%
b5-07
0.0%
—
PID Primary
Delay Time
b5-08
0.00 s
b5-08
0.00 s
—
PID Output
Level Selection
b5-09
0
b5-09
0
b5-09
b5-09
0: Normal
0: Normal
1: Reverse
1: Reverse
PID Output Gain
Setting
b5-10
1.0
b5-10
1.00
Minimum setting units vary.
PID Output
Reverse
Selection
b5-11
0
b5-11
0
b5-11
b5-11
0: Negative PID output
triggers zero limit
0: Negative PID output
triggers zero limit
1: Rotation direction reverses
with negative PID output.
1: Rotation direction reverses
with negative PID output.
PID Feedback
Reference
Missing
Detection
Selection
b5-12
0
b5-12
0
b5-12
b5-12
0: No Detection
0: No Detection
1: Alarm
1: Alarm and MFO
(@PID enable only)
2: Fault
2: Fault and MFO
(@PID enable only)
—
3: Multi-function output only (no
display indication,
@ PID enable/disable)
—
4: An alarm is triggered and the
drive continues running,
@ PID enable/disable.
—
5: Fault is triggered and output is
shut off, @ PID enable/disable.
PID Feedback
Loss Detection
Level
b5-13
0%
b5-13
0%
—
PID Feedback
Loss Detection
Time
b5-14
1.0 s
b5-14
1.0 s
—
PID Sleep
Function Start
Level
b5-15
0.0 Hz
b5-15
0.0 Hz
—
PID Sleep Delay
Time
b5-16
0.0 s
b5-16
0.0 s
—
Parameter Name
P7
P1000
Setting
Parameter
Default
Parameter
Default
P7
P1000