Sync and freeze mode, System behavior – BECKHOFF BC3150 User Manual
Page 85
Safety Instructions
Fieldbus Components
83
Sync and Freeze Mode
In addition to the user data traffic related to the device, which is automatically dealt with by DPM1, a DP master has
the option of sending control commands to one DP slave, to a group of them or to all of them at the same time. These
control commands are transmitted as multicasts. These control commands can be used to specify the sync and
freeze operating modes, in order to synchronize the DP slave. They permit event-controlled synchronization of the
DP slaves.
The DP slaves start sync mode when they receive a sync control command from the assigned DP master. In this
operating mode, the outputs of all the addressed DP slaves are frozen at their current values. In the following user
data transmissions, the DP slaves store the output data, but the output states themselves nevertheless remain
unchanged. Only when the next sync control command is received from the master the stored output data is switched
through to the outputs. Sync operation is ended with an unsync control command.
A freeze control command similarly causes the addressed DP slaves to enter freeze mode. In this operating mode
the states of the inputs are frozen at their current value. The input data is only updated again when the DP master
has sent the next freeze control command to the devices concerned. Freeze operation is ended with an unfreeze
command.
System behavior
The system behavior is also standardized in Profibus DP, so that devices can to a large extent be interchanged. It is
largely determined by the operating condition of the DPM1. This can either be controlled locally, or over the bus by
the project design device.
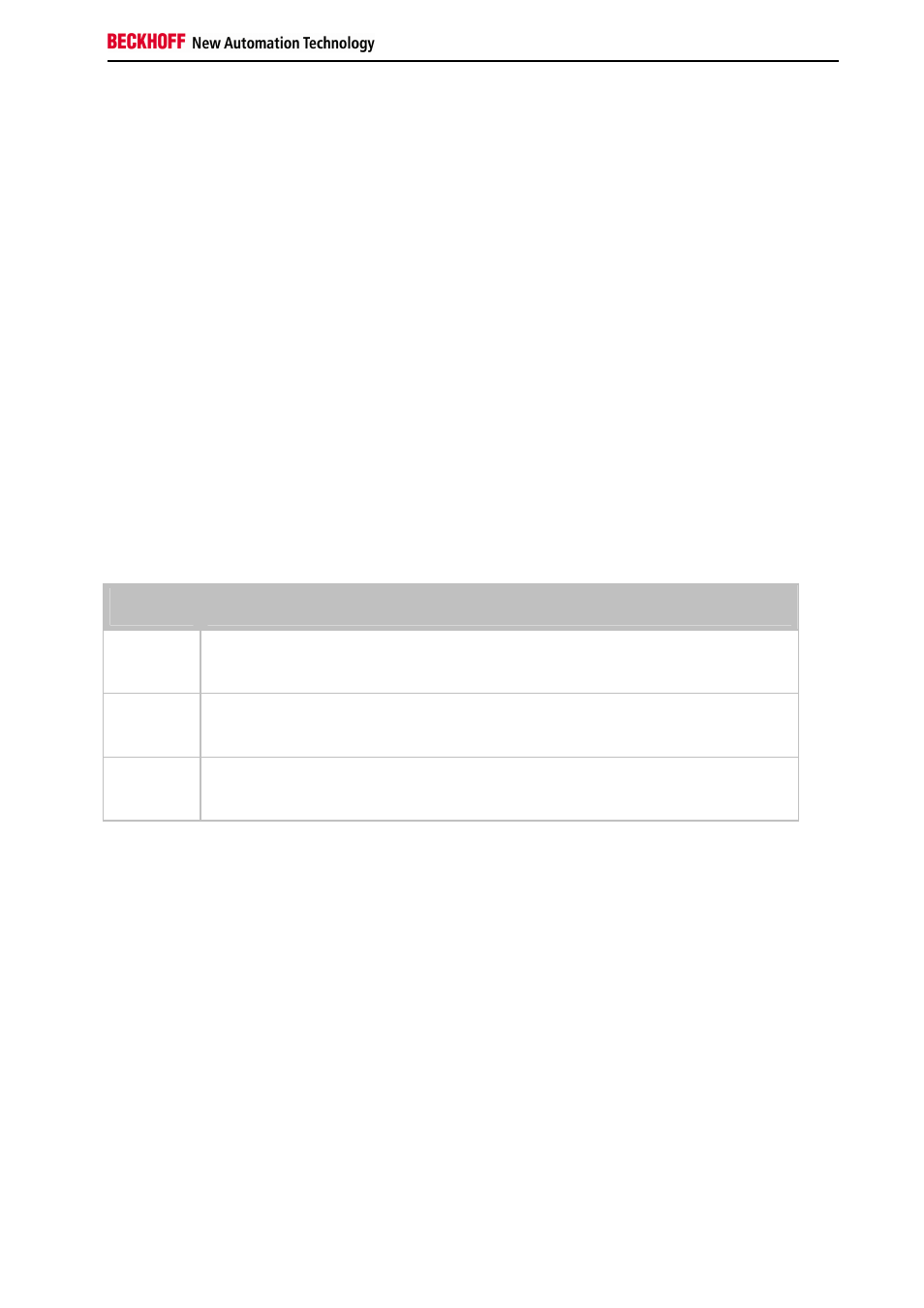
The following three principal conditions are distinguished:
Operation
mode
Description
Stop
There is no data traffic between the DPM1 and the DP slaves. The Bus Coupler only
addresses the Bus Terminals once after the power has been switched on (none of the I/O
LEDs are lit).
Clear
The DPM1 reads the input information from the DP slaves, and maintains the outputs of the
DP slaves in a safe state (depending on the reaction to fieldbus errors, the green I/O LED is lit
and the outputs are set).
Operate
The DPM1 is in a data transfer phase. In the course of cyclic data traffic the inputs of the DP
slaves are read and the output information is transmitted to the DP slaves (the green I/O LED
is lit).
The DPM1 sends its local status at a configurable time interval using a multicast command cyclically to all the DP
slaves that have been assigned to it. The reaction that the system has to the occurrence of an error during the
DPM1's data transfer phase, such as the failure of a DP slave, is specified in the Auto-Clear operating parameter. If
this parameter is set to True, then the DPM1 switches the outputs of all the associated DP slaves into a safe state as
soon as one DP slave is no longer ready for the transfer of user data. The DPM1 then switches into the Clear state. If
the parameter is False then the DPM1 remains in the operating state even after a fault, and the user can himself
specify the system's reaction.