3 ethercat state machine – BECKHOFF EL9xxx User Manual
Page 54
Basics communication
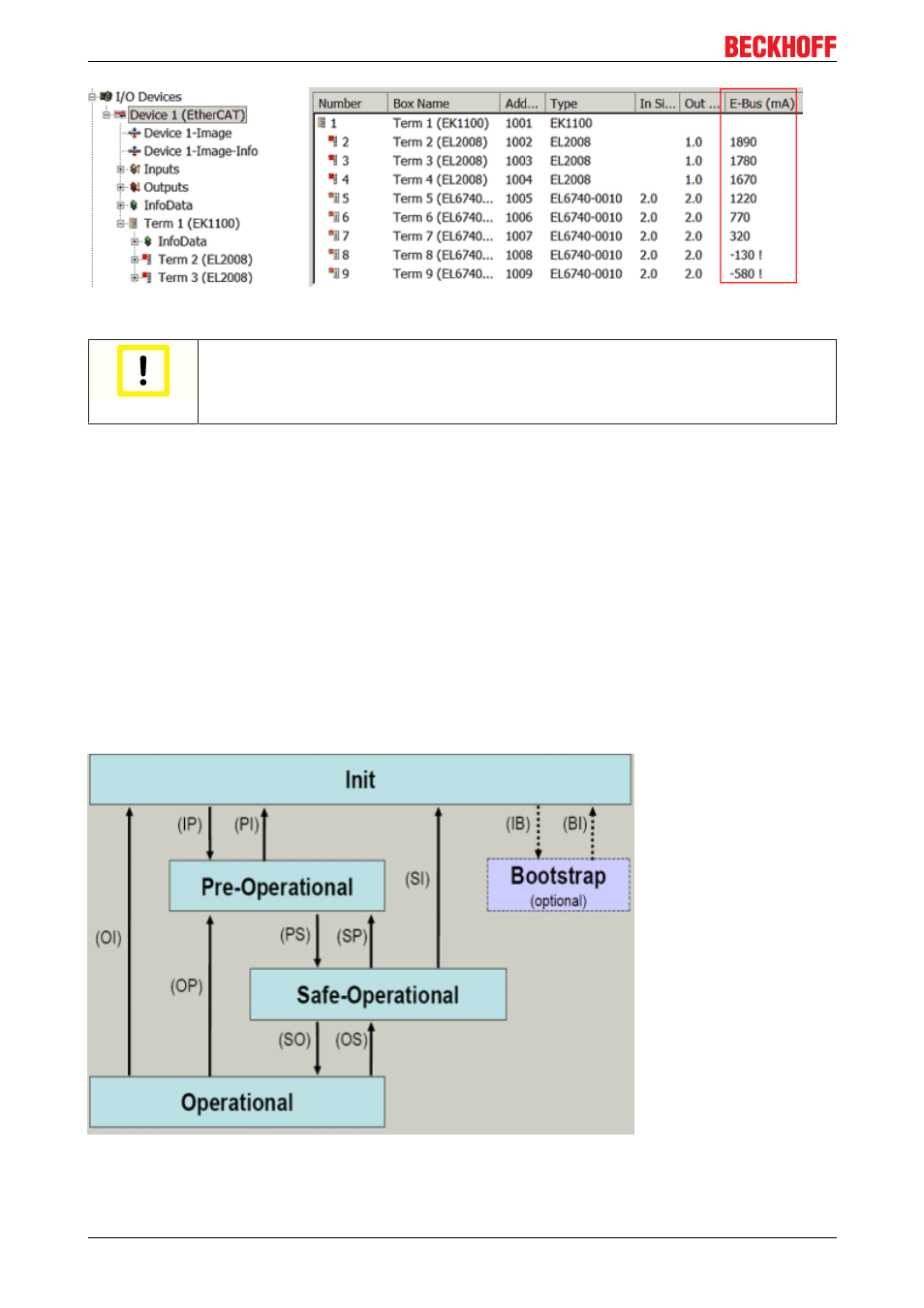
Fig. 41: System manager current calculation
Attention
Caution! Malfunction possible!
The same ground potential must be used for the EBus supply of all EtherCAT terminals in
a terminal block!
4.3
EtherCAT State Machine
The state of the EtherCAT slave is controlled via the EtherCAT State Machine (ESM). Depending upon the
state, different functions are accessible or executable in the EtherCAT slave. Specific commands must be
sent by the EtherCAT master to the device in each state, particularly during the bootup of the slave.
A distinction is made between the following states:
• Init
• PreOperational
• SafeOperational and
• Operational
• Boot
The regular state of each EtherCAT slave after bootup is the OP state.
Fig. 42: States of the EtherCAT State Machine
EL9xxx
54
Version 3.1