Rotation – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors MECHATROLINK-III Communications Reference User Manual
Page 129
4 Operation
4.7.5 Absolute Data Reception Sequence
4-44
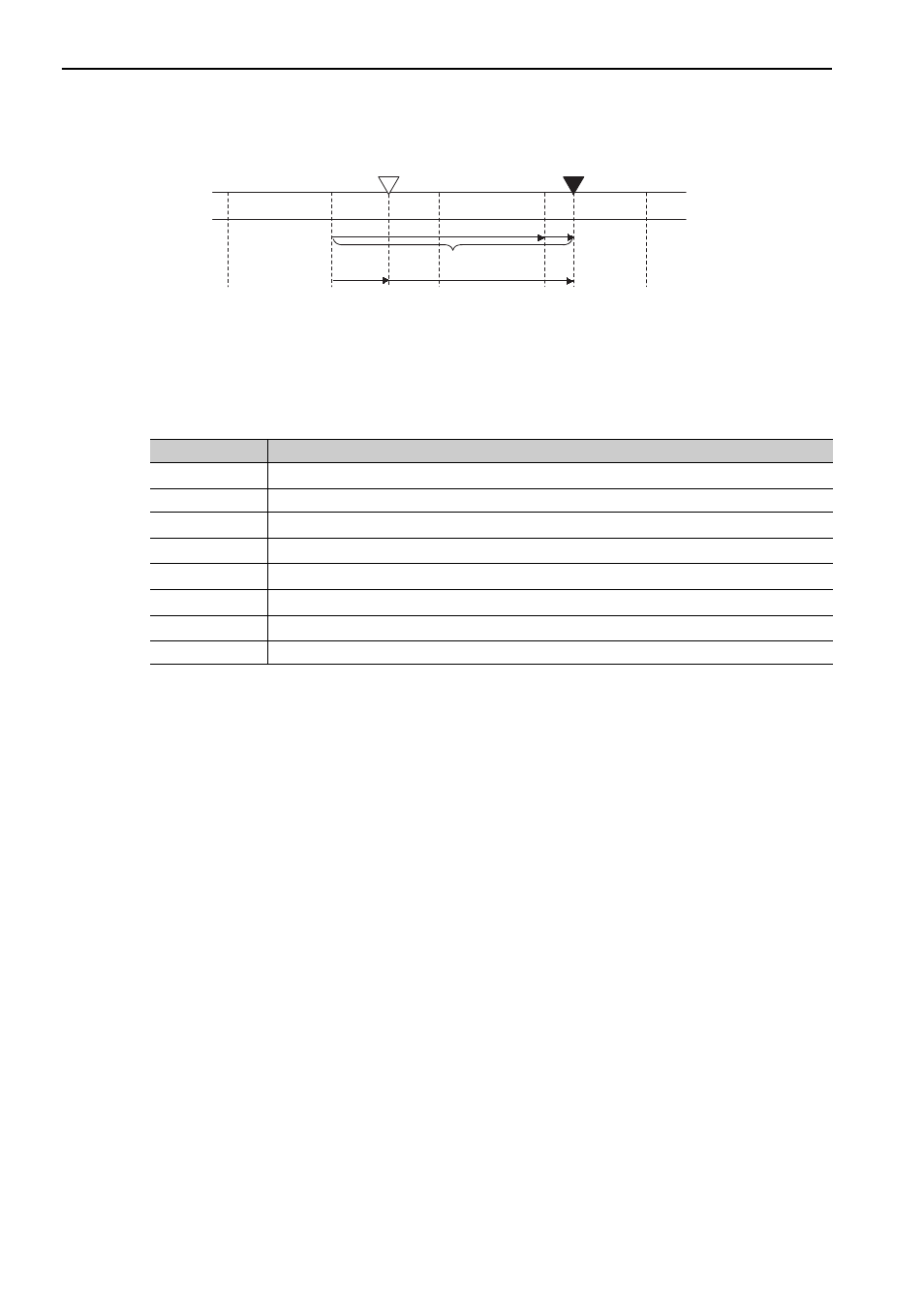
Final absolute data P
M
is calculated by following formula.
P
E
=M
× R+P
O
P
S
=M
S
× R+P
S
’
P
M
=P
E
-P
S
Note: The following formula applies in reverse mode. (Pn000.0 = 1)
P
E
= -M
× R + P
O
P
S
= M
S
× R + P
S
'
P
M
= P
E
- P
S
Coordinate
value
Value of M
Reference position
(at setup)
Current position
- 1
0
+1
+2
+3
+2
+1
-1
±0
P
E
P
M
P
S
P
O
M
× R
Rotation
Signal
Meaning
P
E
Current value read by encoder
M
Rotational serial data
P
O
Number of initial incremental pulses
P
S
Absolute data read at setup (This is saved and controlled by the host controller.)
M
S
Rotational data read at setup
P
S
’
Number of initial incremental pulses read at setup
P
M
Current value required for the user’s system
R
Number of pulses per encoder revolution (pulse count after dividing, value of Pn212)