2 mechatrolink-iii commands, 3 basic functions settings, 1 servomotor rotation direction – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors MECHATROLINK-III Communications Reference User Manual
Page 89
4 Operation
4.3.1 Servomotor Rotation Direction
4-4
4.2 MECHATROLINK-III Commands
For information on the MECHATROLINK-III commands, refer to
Σ
-V Series User’s Manual MECHA-
TROLINK-III Standard Servo Profile Commands (No: SIEP S800000 63).
4.3 Basic Functions Settings
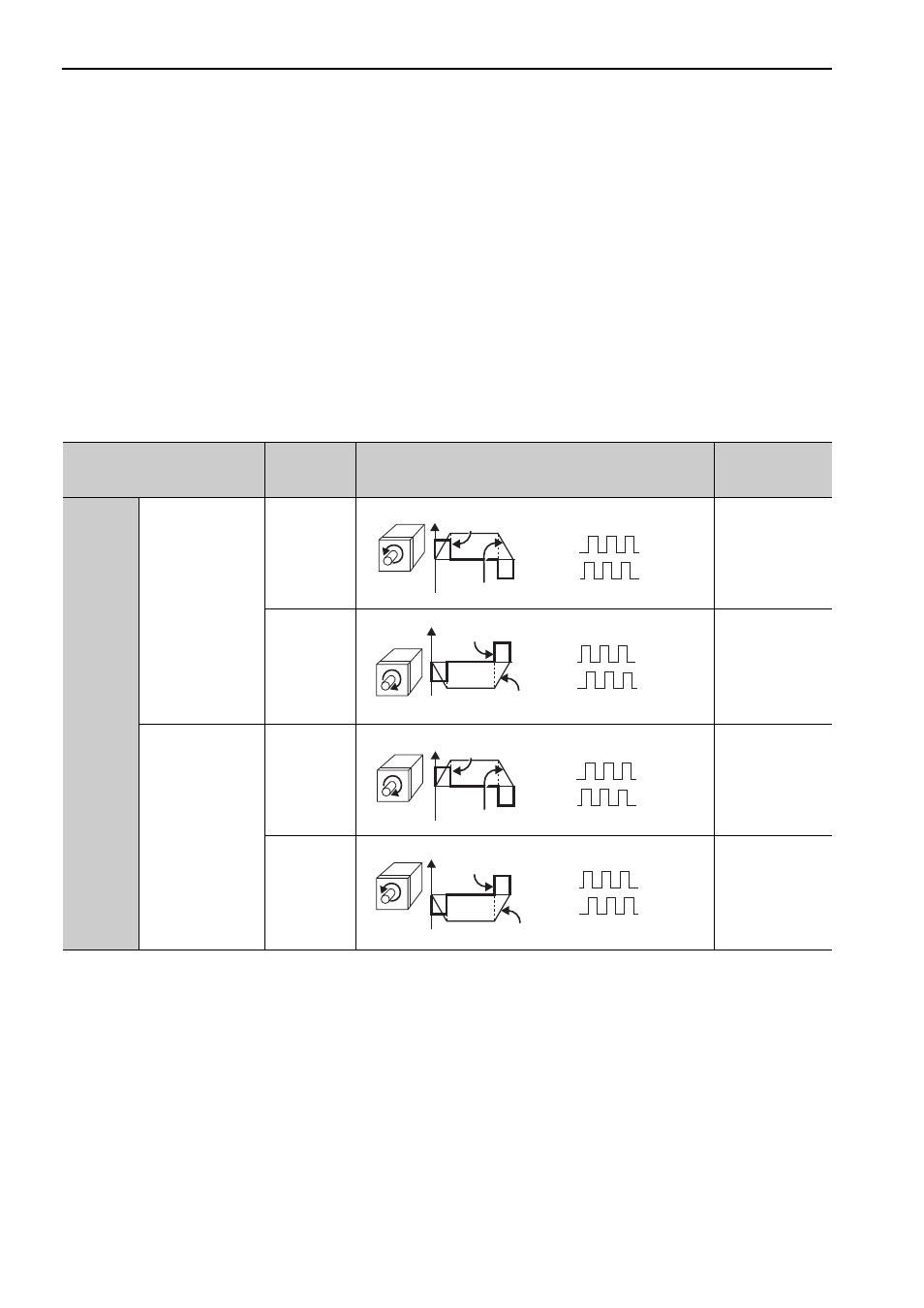
4.3.1 Servomotor Rotation Direction
The servomotor rotation direction can be reversed with parameter Pn000.0 without changing the polarity of
the speed/position reference. This causes the rotation direction of the servomotor to change, but the polarity of
the signal, such as encoder output pulses, output from the SERVOPACK does not change. (refer to 4.4.4
Encoder Output Pulses)
The standard setting for forward rotation is counterclockwise (CCW) as viewed from the load end of the ser-
vomotor.
Note: SigmaWin+ trace waveforms are shown in the above table.
Parameter
Forward/
Reverse Ref-
erence
Direction of Motor Rotation and Encoder Output Pulse
Applicable Over-
travel (OT)
Pn000
n.
0
Sets CCW as for-
ward direction.
[Factory setting]
Forward
Reference
P-OT
Reverse
Reference
N-OT
n.
1
Sets CW as for-
ward direction.
(Reverse Rotation
Mode)
Forward
Reference
P-OT
Reverse
Reference
N-OT
CCW
Phase B
advanced
Time
Encoder output pulse
PAO
PBO
Motor speed
Torque reference
Motor speed
+
CW
Phase A
advanced
Time
Encoder output pulse
Motor speed
Torque reference
Motor speed
PAO
PBO
+
PAO
PBO
CW
Phase B
advanced
Encoder output pulse
Motor speed
Torque reference
Motor speed
+
Time
CCW
Phase A
advanced
Encoder output pulse
PAO
PBO
+
Time
Motor speed
Torque reference
Motor speed