6 related drive parameters, 6related drive parameters – Yaskawa SI-ET3 User Manual
Page 17
6 Related Drive Parameters
YASKAWA ELECTRIC SIEP C730600 62B 1000-Series Option SI-ET3 Technical Manual
17
6
Related Drive Parameters
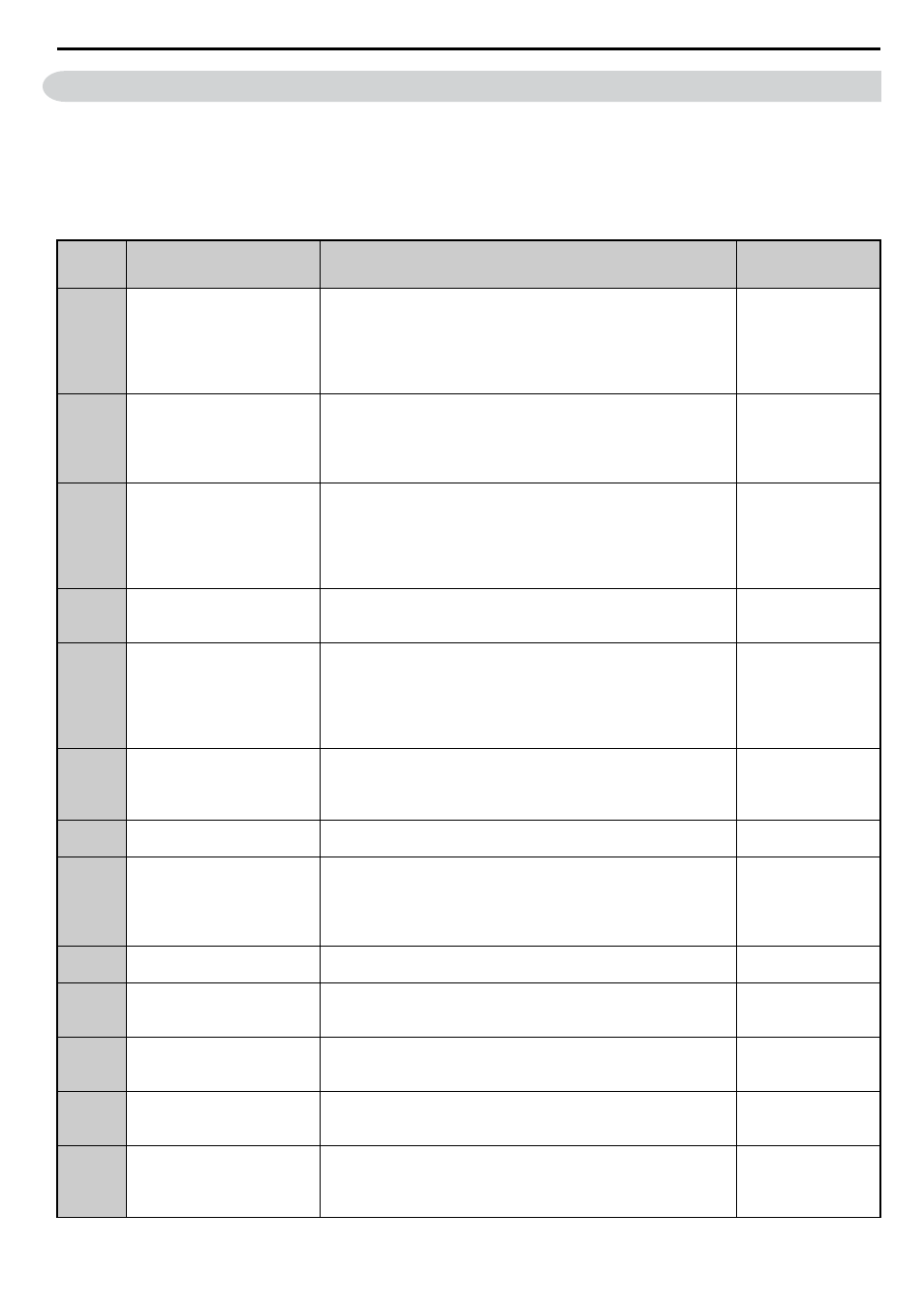
The following parameters are used to set up the drive for operation with the option. Parameter setting instructions can be
found in the drive instruction manual.
Confirm proper setting of the all parameters in
using the digital operator before starting network
communications.
Table 6 Related Parameter Settings
No.
(Addr.
Hex)
Name
Description
Values
b1-01
(180)
Frequency Reference Selection
Selects the frequency reference input source.
0: Operator - Digital preset speed d1-01 to d1-17
1: Terminals - Analog input terminal A1 or A2
2: MEMOBUS/Modbus communications
3: Option
4: Pulse Input (Terminal RP)
Default: 1
Range: 0 to 4
(Set to 3)
b1-02
(181)
Run Command Selection
Selects the run command input source.
0: Digital Operator - RUN and STOP keys
1: Digital input terminals S1 to S8
2: MEMOBUS/Modbus communications
3: Option
Default: 1
Range: 0 to 3
(Set to 3)
F6-01
(3A2)
Operation Selection after
Communications Error
Determines drive response when a bUS error is detected during
communications with the option.
0: Ramp to Stop
1: Coast to Stop
2: Fast-Stop
3: Alarm Only
Default: 1
Range: 0 to 3
F6-02
(3A3)
External Fault Detection
Conditions (EF0)
Sets the condition for external fault detection (EF0).
0: Always detected
1: Detected only during operation
Default: 0
Range: 0, 1
F6-03
(3A4)
Stopping Method for External
Fault from the Communication
Option
Determines drive response for external fault input (EF0) detection during
option communications.
0: Ramp to Stop
1: Coast to Stop
2: Fast-Stop
3: Alarm Only
Default: 1
Range: 0 to 3
F6-06
(3A7)
Torque Reference/Torque Limit
Selection from the
Communication Option
0: Torque Reference/Torque Limit via network communications are
disabled.
1: Torque Reference/Torque Limit via network communications are
enabled.
Default: 0
Range: 0, 1
F6-07
(3A8)
NetRef/ComRef Selection
Function
0: Multi-step speed reference disabled (F7 functionality)
1: Multi-step speed reference allowed (V7 functionality)
Default: 0
Range: 0, 1
F6-08
(36A)
Reset Communication Related
Parameters
Determines if communication-related parameters F6- and F7-
are set back to original default values when the drive is initialized using
parameter A1-03.
0: Do not reset parameters
1: Reset parameters
Default: 0
Range: 0, 1
F6-20
MECHATROLINK Station
Address
Sets the station number.
Default: 21H
Range: 20 to 3FH
F6-21
MECHATROLINK Frame Size
Sets the frame size.
0: 64 byte
1: 32 byte
Default: 0
Range: 0, 1
F6-23
MECHATROLINK Monitor
Selection
(Code 0EH)
Set MEMOBUS/Modbus register to monitor SEL_MON of INV_CTL
and INV_CTL.
Default: 0H
Range: 0 to FFFFH
F6-24
MECHATROLINK Monitor
Selection
(Code 0FH)
Set MEMOBUS/Modbus register to monitor SEL_MON of INV_CTL
and INV_CTL.
Default: 0H
Range: 0 to FFFFH
F6-25
Operation Selection at Watchdog
Error (E5)
0: Ramp to stop. Decelerate to stop using the deceleration time in C1-02.
1: Coast to stop.
2: Fast Stop. Decelerate to stop using the deceleration time in C1-09.
3: Alarm only.
Default: 1
Range: 0 to 3