Yaskawa AC Drive-L1000E Safety Precautions User Manual
Page 40
8 Troubleshooting
40
YASKAWA TOEP YAIL1E 02A YASKAWA AC Drive - L1000E Safety Precautions
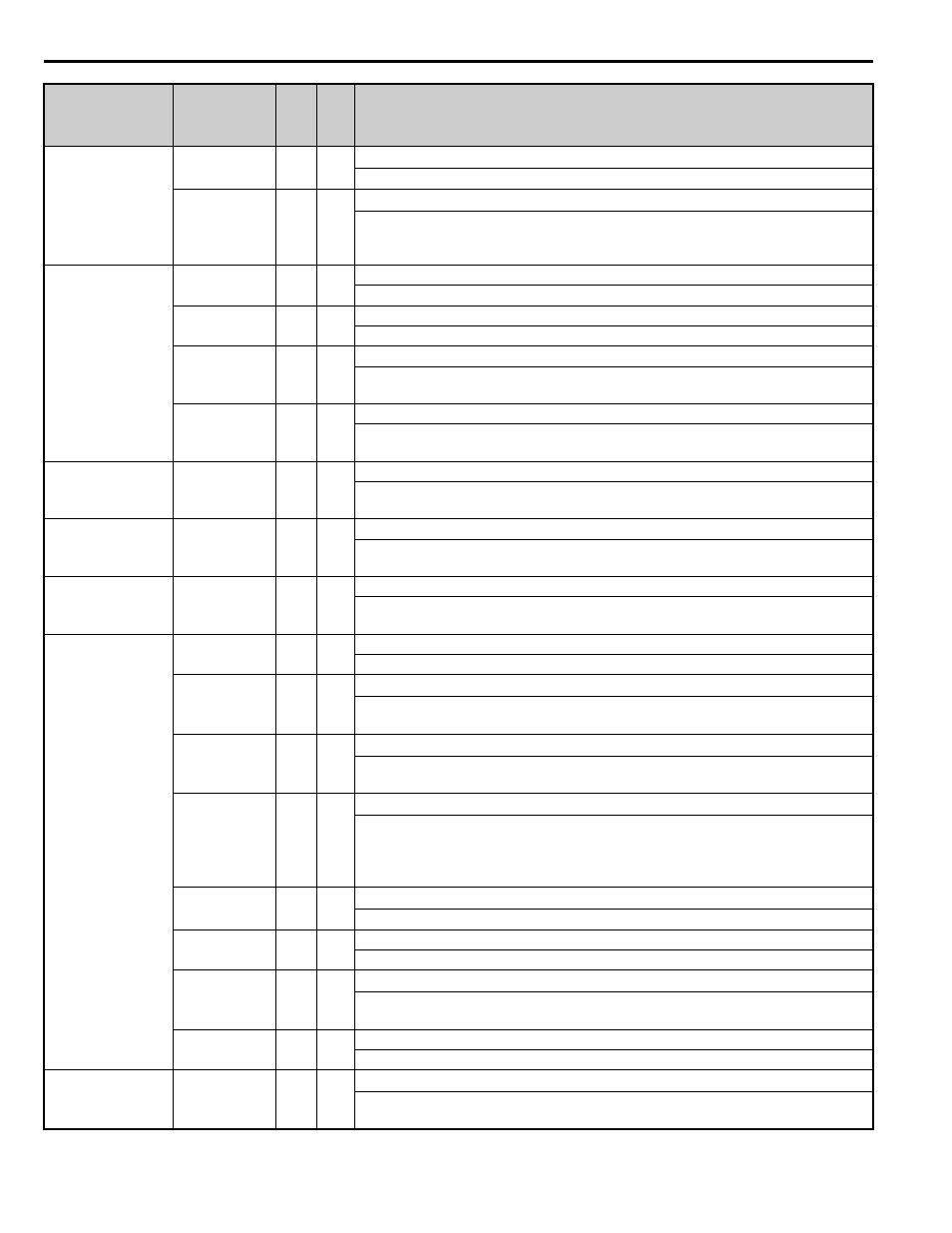
EF,SE
SE3
O
Output Current Error
The output current was lower than 25% of the motor no-load current during operation.
SE4
O
Brake Feedback Error
The input terminal set for “Brake feedback” (H1- = 79) or “Brake feedback 2” (H1-
= 5B) did not respond within the SE4 error time set to S6-05 after an output terminal
set for “Brake release” (H2- = 50) closed.
ALARM(RUN)
Other Fault
voF
O
O
Output Voltage Detection Error
Problem detected with the voltage on the output side of the drive.
boL
O
O
Braking Transistor Overload
The braking transistor in the drive has been overloaded.
bUS
O
O
Option Communication Error
• The connection was lost after establishing initial communication.
• Only detected when the Up/Down command speed reference is assigned to an option card.
CE
O
O
MEMOBUS/Modbus Communication Error
Control data was not received correctly for two seconds or for the amount of time set in
parameter, H5-09 Communication Fault Detection Time
Other Fault
CF
O
Control Fault
The torque limit was reached continuously for three seconds or longer while ramping to
stop in OLV Control.
Other Fault
CoF
O
Current Offset Fault
The current sensor is damaged or there was residual induction current in the motor (e.g.,
during sudden deceleration or when coasting) when the drive attempted to start the motor.
ALARM(RUN)
Other Fault
dEv
O
O
Speed Deviation (when using a PG option card)
The deviation between the speed reference and speed feedback is greater than the setting in
F1-10 for longer than the time in F1-11.
Other Fault
dv1
O
Encoder Z Pulse Fault
The motor turned one full rotation without the Z Pulse being detected.
dv2
O
Z Pulse Noise Fault Detection
The Z pulse is out of phase by more than 5 degrees for the number of times specified in
parameter F1-17.
dv3
O
Inversion Detection
The torque reference and acceleration are in opposite directions and the speed reference and
actual motor speed differ by over 30% for the number of times set to F1-18.
dv4
O
Inversion Prevention Detection
Pulses indicate that the motor is rotating in the opposite direction of the speed reference. Set
the number of pulses to trigger inverse detection to F1-19.
Note: Set F1-19 to 0 to disable inverse detection in applications where the motor may rotate
in the opposite direction of the speed reference.
dv6
O
Overacceleration Detection
The acceleration of the elevator car exceeds the overacceleration detection level (S6-10)
dv7
O
Rotor Polarity Detection Timeover
Unable to detect the magnetic poles within the designated time.
dv8
O
PM Rotor Position Estimation Error
An invalid value resulted from Initial Pole Search.
Note: Reset the fault and try Initial Pole Search again.
Err
O
EEPROM Write Error
Data cannot be written to the EEPROM.
Other Fault
FrL
O
Speed Reference Missing
Parameter d1-18 is set to 3, leveling speed detection is not assigned to a digital input (H1-
≠ 53) and no speed was selected while an Up or Down command was entered.
JVOP-184
Status Text
ALARM
FAULT
Fault/Alarm
Code
<1>
ALM FLT
Fault Name/Cause