Figure 16: starutil rover navigation setup – NavCom SF-2050 Rev.G User Manual
Page 57
Advertising
SF-2050 User Guide – Rev. G
4-55
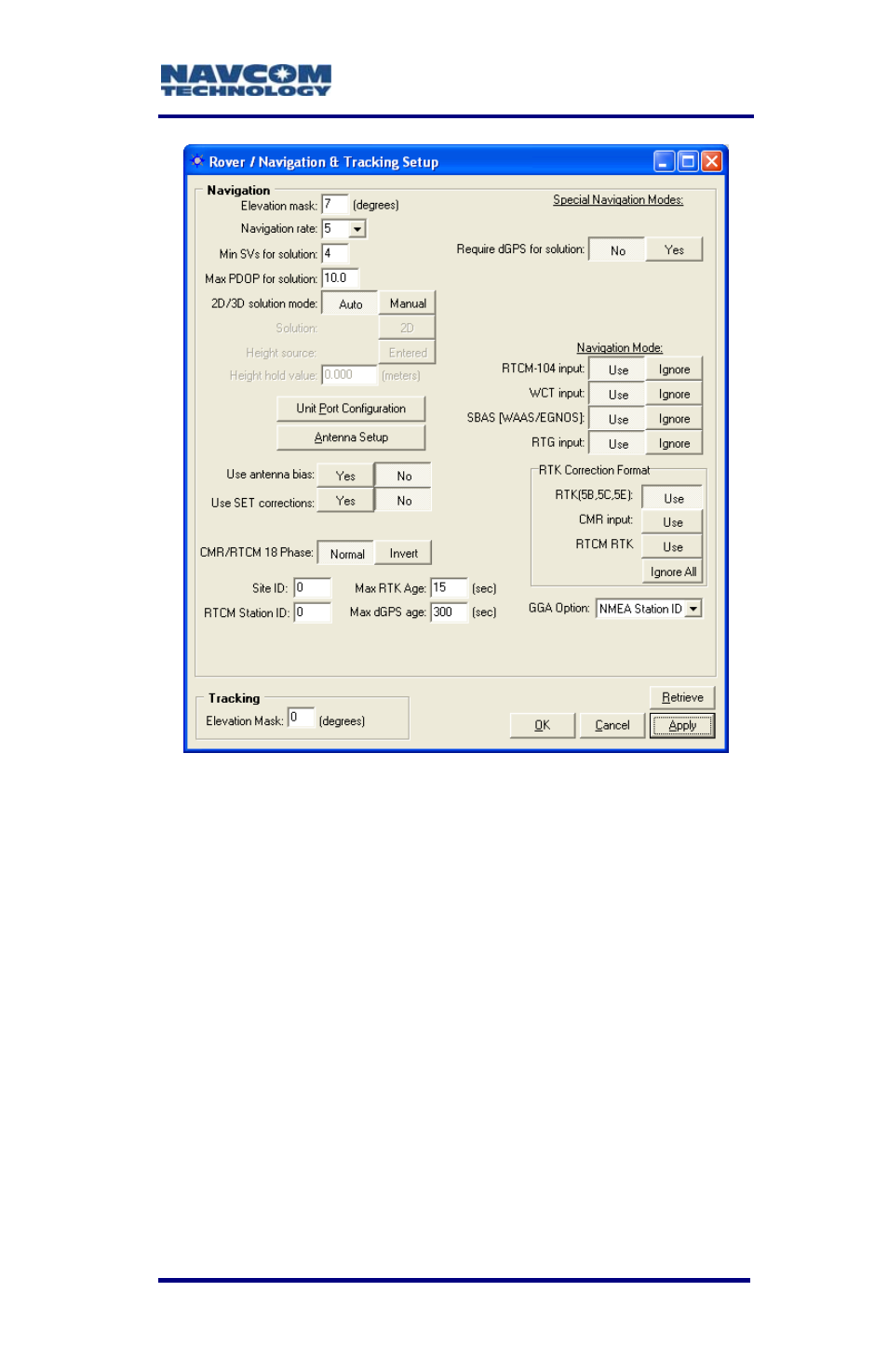
Figure 16: StarUtil Rover Navigation Setup
This port is normally used to output data to other
devices or machines that can make immediate use of
the precise positioning data available from the
SF-2050. COM1 also serves as the DGPS correction
input/output port when NCT
1
RTK/UltraRTK™, CMR,
or RTCM RTK correction services are in use.
COM2
9 Configuration - Control Port
9 Rate – 19.2Kbps
This port is normally used to input and output
proprietary messages used for navigation and
receiver setup. Table 9 describes the default
1
Separate Software Option Required. UltraRTK™ Requires
NCT-2100D Engine.
Advertising
This manual is related to the following products: