D.4 sigma-i servopack, D.4 σ-i servopack, A-34 – Yaskawa MP2300S Basic Module User Manual
Page 356
Appendix D Initializing the Absolute Encoder
D.4
Σ-I SERVOPACK
A-34
D.4
Σ-I SERVOPACK
Refer to the following manuals for information on
Σ-I SERVOPACKS.
Σ
Series SGM
/SGD User’s Manual (manual number: SIE-S800-26.3)
Σ
Series SGM
/SGDB High-speed Field Network MECHATROLINK-compatible AC Servo Driver User’s Manual
(manual number: SIE-S800-26.4)
( 1 ) Initializing a 12-bit Absolute Encoder
Use the following procedure to initialize a 12-bit absolute encoder.
1.
Properly connect the SERVOPACK, Servomotor, and MP2300S.
2.
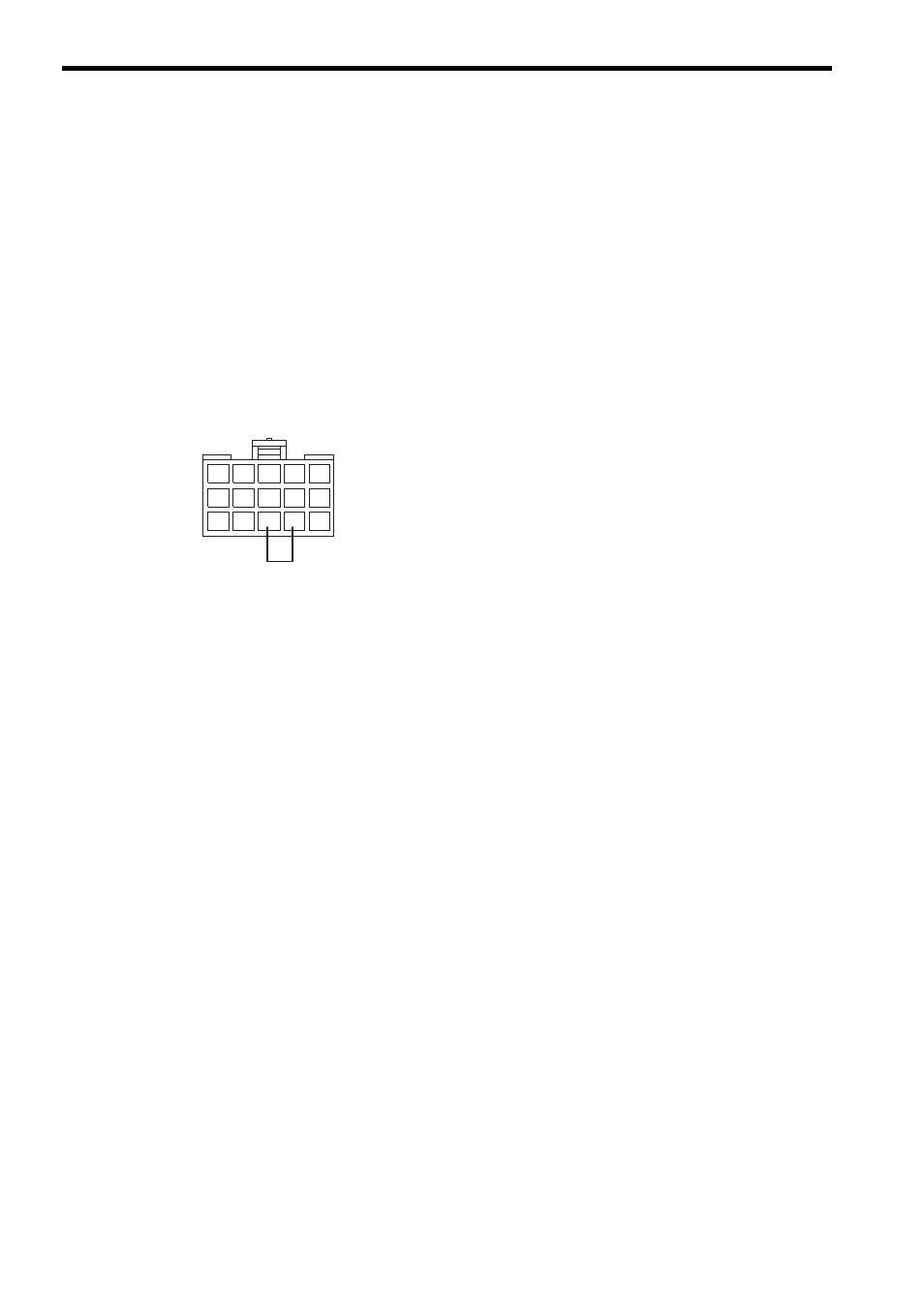
Disconnect the connector on the encoder end and short-circuit pins 13 and 14 on the encoder end con-
nector for 2 seconds or more.
3.
Remove the short piece and insert the connector securely in its original position.
4.
Connect the cables using normal wiring and make sure the encoder battery is connected.
5.
Turn ON the system.
Repeat the procedure starting from step 1 if an Absolute Encoder Alarm occurs, so the system has been success-
fully initialized.
13 14