Table 15: device state bits – Applied Motion ST10-C-CE User Manual
Page 47
47
920-0025 Rev K
3/5/2015
CANopen User Manual
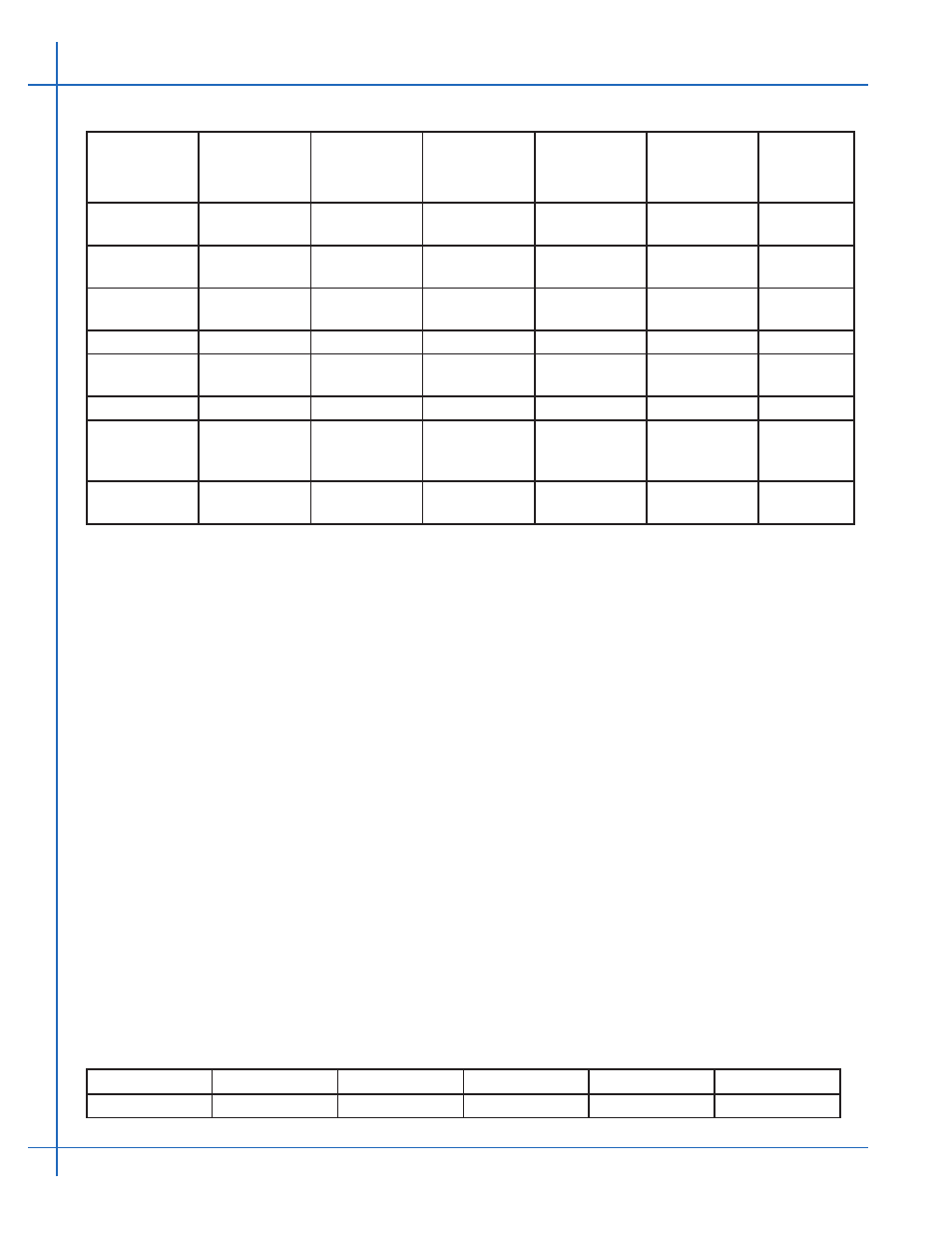
The following bits indicate the status of the device:
State
Bit 6
Switch On
Disable
Bit 5
Quick
Stop
Bit 3
Fault
Bit 2
Operation
Enabled
Bit 1
Switch
On
Bit 0
Ready to
Switch On
Not Ready
to Switch On
0
X
0
0
0
0
Switch On
Disabled
1
X
0
0
0
0
Ready to
Switch On
0
1
0
0
0
1
Switched On
0
1
0
0
1
1
Operation
Enabled
0
1
0
1
1
1
Fault
0
X
1
1
1
1
Fault
Reaction
Active
0
X
1
1
1
1
Quick Stop
Active
0
0
0
1
1
1
Table 15: Device State Bits
Bits marked × are irrelevant for the state. Other bit combinations are not allowed
Bit 9: Remote
If bit 9 is set, then parameters may be modified via the CAN-network, and the drive ex-
ecutes the content of a command message. If the remote bit is reset, then the drive is in local
mode and will not execute the command message. The drive may transmit messages contain-
ing valid actual values like a position_actual_value, depending on the actual drive configura-
tion. The drive will accept accesses via service data objects (SDOs) in local mode.
Bit 10: Target Reached
If bit 10 is set by the drive, then a setpoint has been reached (torque, speed or position
depending on the modes_of_operation). The change of a target value by software alters this
bit. If quickstop_option_code is 5, 6, 7 or 8, this bit must be set, when the quick stop operation
is finished and the drive is halted. If Halt occured and the drive has halted then this bit is set
too.
Bit 11: Internal Limit Active
When this bit is set, the drive indicates that an internal limitation is active (e.g. position_
range_limit).
Here is the Command Structure.
Object Type
Data Type
Access Type
PDO Mapping
COS
Default value
Var
UNSIGNED16
ro
yes
yes
0