Table 31: pdo mapping - stepper, Table 32: pdo mapping - servo, Default pdo mapping - stepper – Applied Motion ST10-C-CE User Manual
Page 94: Default pdo mapping - servo
94
920-0025 Rev K
3/5/2015
CANopen User Manual
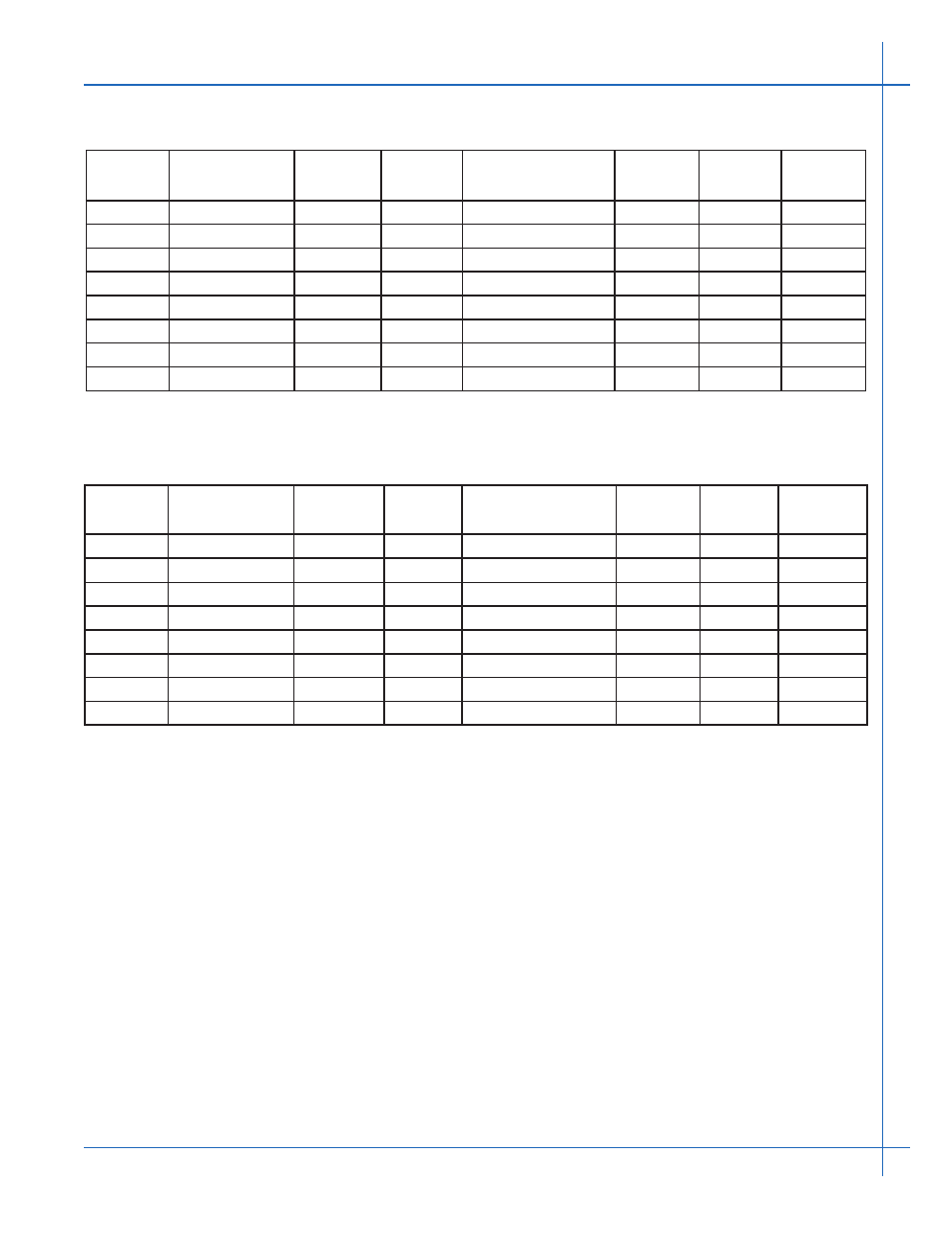
Default PDO Mapping - Stepper
Table 31: PDO Mapping - Stepper
Default PDO Mapping - Servo
Table 32: PDO Mapping - Servo
PDO
Name
First Mapped
Parameter
OD Entry # Bytes
Second Mapped
Parameter
OD Entry # Bytes
# Bytes
Total
TPDO1
Statusword
6041
h
2
2
TPDO2
Statusword
6041
h
2
Target Position
6064
h
4
6
TPDO3
Statusword
6041
h
2
Target Velocity
606C
h
2
4
TPDO4
Input Status
7003
h
1
1
RPDO1
Controlword
6040
h
2
2
RPDO2
Controlword
6040
h
2
Target Distance
607A
h
4
6
RPDO3
Controlword
6040
h
2
Target Velocity
60FF
h
2
4
RPDO4
Output State
60FE
h
1
1
PDO
Name
First Mapped
Parameter
OD Entry # Bytes
Second Mapped
Parameter
OD Entry # Bytes
# Bytes
Total
TPDO1
Statusword
6041
h
2
2
TPDO2
Statusword
6041
h
2
Actual Position
700A
h
4
6
TPDO3
Statusword
6041
h
2
Actual Velocity
7009
h
2
4
TPDO4
Input Status
7003
h
1
1
RPDO1
Controlword
6040
h
2
2
RPDO2
Controlword
6040
h
2
Target Distance
607A
h
4
6
RPDO3
Controlword
6040
h
2
Target Velocity
60FF
h
2
4
RPDO4
Output State
60FE
h
1
1