Applied Motion ST10-C-CE User Manual
Page 52
52
920-0025 Rev K
3/5/2015
CANopen User Manual
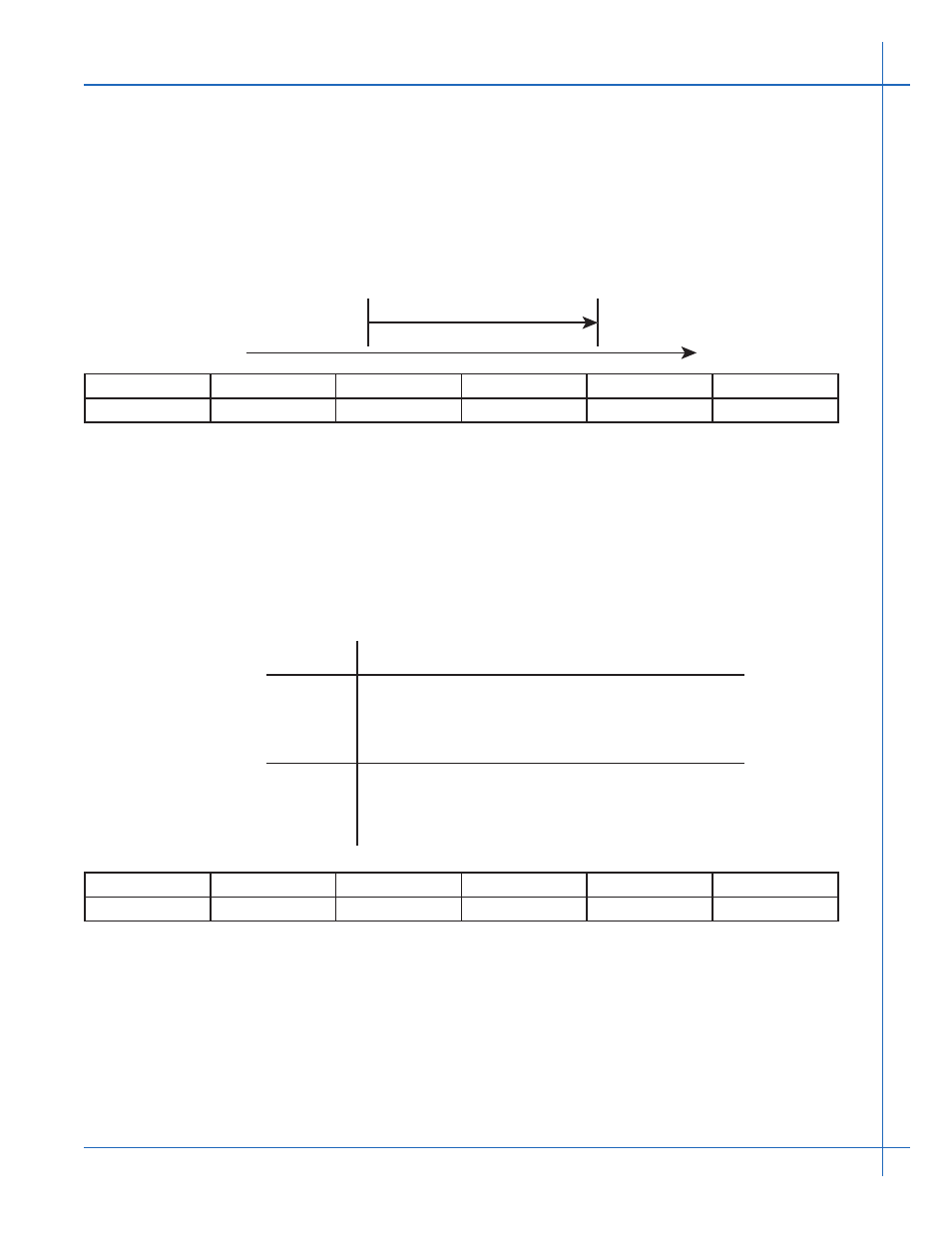
0x607C home_offset
The home_offset object is the difference between the zero position for the application and
the machine home position (found during homing). During homing the home position is found
and, once the homing is completed, the zero position is offset from the home position by add-
ing the home_offest to the home position. All subsequent absolute moves shall be taken rela-
tive to this new zero position. This is illustrated in the following diagram.
Object Type
Data Type
Access Type
PDO Mapping
COS
Default value
Var
INTEGER32
rw
yes
No
0
0x607E polarity
This object contains two individual bits to set the polarity of position and velocity in their
own mode. Bit7 (position polarity bit) indicates the position demand value (related to the tar-
get_postition object whose index is 0x607A) shall be multiplied by 1 or by –1. The polarity flag
shall have no influence on the homing mode. Bit6 (velocity polarity bit) indicates that the veloc-
ity demand value (related to the profile velocity whose index is 0x60FF) shall be multiplied by 1
or -1.
Object Type
Data Type
Access Type
PDO Mapping
COS
Default value
Var
UNSIGNED8
rw
yes
No
0
The position polarity bit shall be used only for profile position (pp) mode. The velocity po-
larity bit shall be used only for profile velocity (pv) mode.
Home
Position
Zero
Position
Home_Offset
Position polarity
0=> multiply by 1(default)
1=> multiply by -1
Velocity polarity
0=> multiply by 1(default)
1=> multiply by -1
Bit
7
6
Meaning