Figure 13 – Applied Motion ST10-C-CE User Manual
Page 63
63
920-0025 Rev K
3/5/2015
CANopen User Manual
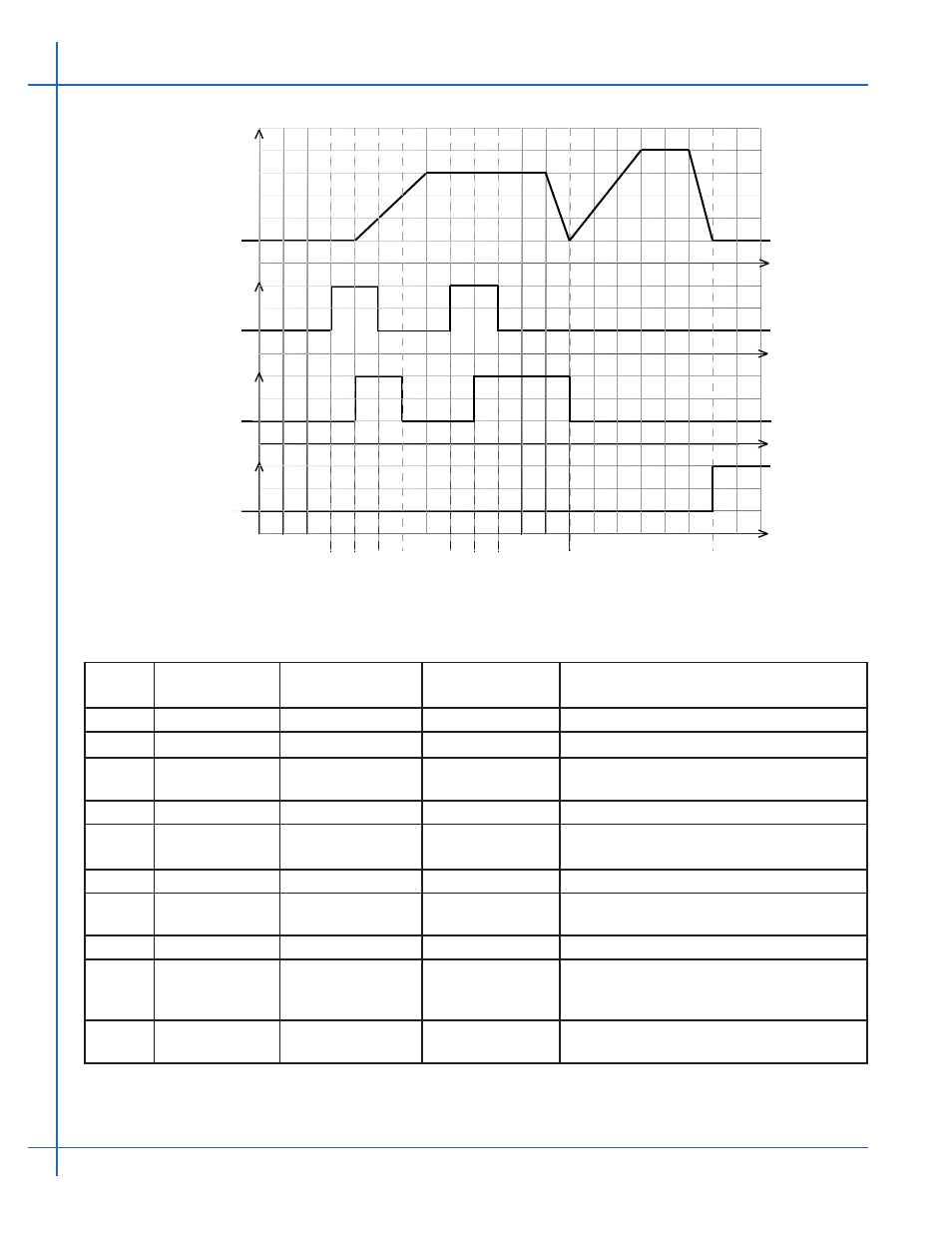
Figure 13: Multiple Set-Points, Stopping Between Moves
In this example, controlword bits 9 (Change of Set-point) and 5 (Change Set Immediately) are 0. The motor
comes to rest between moves.
Table 20: Multiple Set-Point Profile Position Move with Stopping Between Moves
Actual
Speed
0
0
0
0
t
t
t
t
New Set Point
Ready Bit(4)
Set Point
Ack Bit(12)
Target Reached
Bit(10)
PROFILE POSITION MODE, Set of Set Points
D
A B C
E
F G
H
I
Graph
Point
New Set-Point
Ready Bit
Set-Point
Acknowledge Bit
Target Reached
Bit
What’s Going On
Start
0
0
0
Drive waiting for set-point
A
0 -> 1
0
0
User tells drive a set-point is ready
B
1
0 -> 1
0
Drive acknowledges set-point, starts
executing set-point
C
1 -> 0
1
0
User pulls new set-point ready bit low
D
0
1 -> 0
0
Drive pulls set-point ack bit low, indicat-
ing ready to receive another set-point
E
0 -> 1
0
0
User tells drive another set-point is ready
F
1
0 -> 1
0
Drive acknowledges set-point, buffers it
as another set-point is still in progress
G
1 -> 0
1
0
User pulls new set-point ready bit low
H
0
1 -> 0
0
Drive pulls set-point ack bit low, starts
executing new set-point as soon as old
one is finished
I
0
0
1
The set-point is finished, no set-points in
buffer, so Target Reached bit is set