2) format, 3) programming examples, 2) format (3) programming examples – Yaskawa MP2000 Series: User's Manual for Motion Programming User Manual
Page 186
8.3 Axis Control Commands
8-79
8
Command Reference
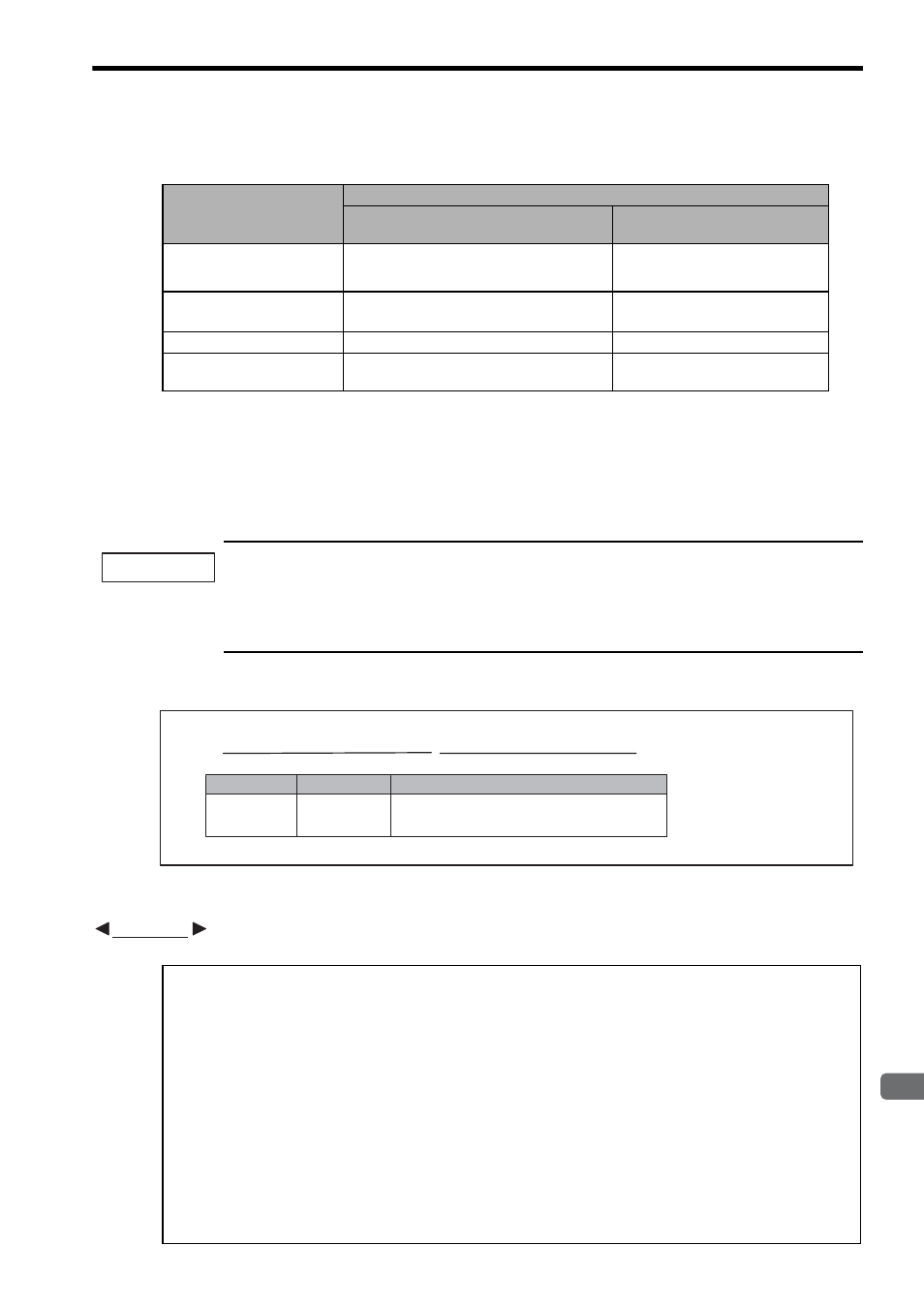
The following table shows the setting status of the machine coordinate system and the work coordinate system.
* 1. Default setting: The current position is set as the machine coordinate origin when the power is turned
ON. If the Zero Point Return operation is then not executed, the software limit switch function will not
be effective.
* 2. Yes: The machine coordinate origin is set using the position information in the absolute position detec-
tion encoder.
* 3. Cancelled: The previously set work coordinate system is cancelled, and the work coordinate system is
the same as the machine coordinate system.
• For infinite-length axes, set a value within the range of 0 to POSMAX.
If a value outside the setting range is set for any infinite-length axis, an alarm will occur in the motion pro-
gram.
• When the zero point return operation is executed without using a ZRN command, such as zero point return
operation executed from the ladder program, the work coordinate system will not be cancelled.
(2) Format
(3) Programming Examples
A POS command programming example is shown below.
Table 8.1 Coordinate System Setting Timing
Coordinate System Setting
Timing
Motion Fixed Parameter 30: Encoder Selection
0 or 2: Incremental Encoder/Absolute
Encoder (Incremental Encoder is Used)
1: Absolute Encoder
After power ON
Machine coordinate system: Default setting
*1
Work coordinate system: Cancelled
*3
Machine coordinate system: Yes
*2
Work coordinate system: Cancelled
After Zero Point Return
command (ZRN)
Machine coordinate system: Set
Work coordinate system: Cancelled
Work coordinate system: Cancelled
After POS command
Work coordinate system: Set
Work coordinate system: Set
After Zero Point Set (ZSET)
command
Machine coordinate system: Set
Machine coordinate system: Set
IMPORTANT
... ;
Item
Unit
Usable Data
Coordinate axis Reference unit
Directly designated value
Double integer type regisger
(Indirect designation)
POS [Logical axis name 1] Coordinate axis [Logical axis name 2] Coordinate axis
ABS;
MOV [A1]1000 [B1]2000;
POS [A1]0 [B1]0;
MOV [A1]3000 [B1]4000;
DL00000 = IL8010;
DL00002 = IL8090;
POS [A1]DL00000 [B1]DL00002;
END;
" Absolute mode
" Positioning
" Set work coordinate system
" Positioning
" Get Machine Coordinate System Calculated Position (CPOS) of Axis A1
" Get Machine Coordinate System Calculated Position (CPOS of Axis B1
" Cancel work coordinate system
EXAMPLE