3 electronic gear, 1) parameter setting example using ball screw – Yaskawa MP2000 Series: User's Manual for Motion Programming User Manual
Page 98
7 Programming
7.2.3 Electronic Gear
7-10
The range of reference positions for an axis move command are as follows:
7.2.3 Electronic Gear
In contrast to the reference unit input to the Machine Controller, the moving unit in the mechanical system is
called the “output unit.” The electronic gear converts position or speed units from reference units to output units
for the mechanical system without going through an actual mechanism, such as a gear.
When the axis of the motor has rotated m times and the mechanical configuration allows the axis at the load to
rotate n times, this electronic gear function can be used to make the reference unit equal to the output unit.
The electronic gear function is enabled when the following settings are made:
• Fixed Parameter 6: Travel Distance per Machine Rotation
• Fixed Parameter 8: Servo Motor Gear Ratio
• Fixed Parameter 9: Machine Gear Ratio
Note: The electronic gear is disabled when the pulse is specified for the Reference Unit Selection.
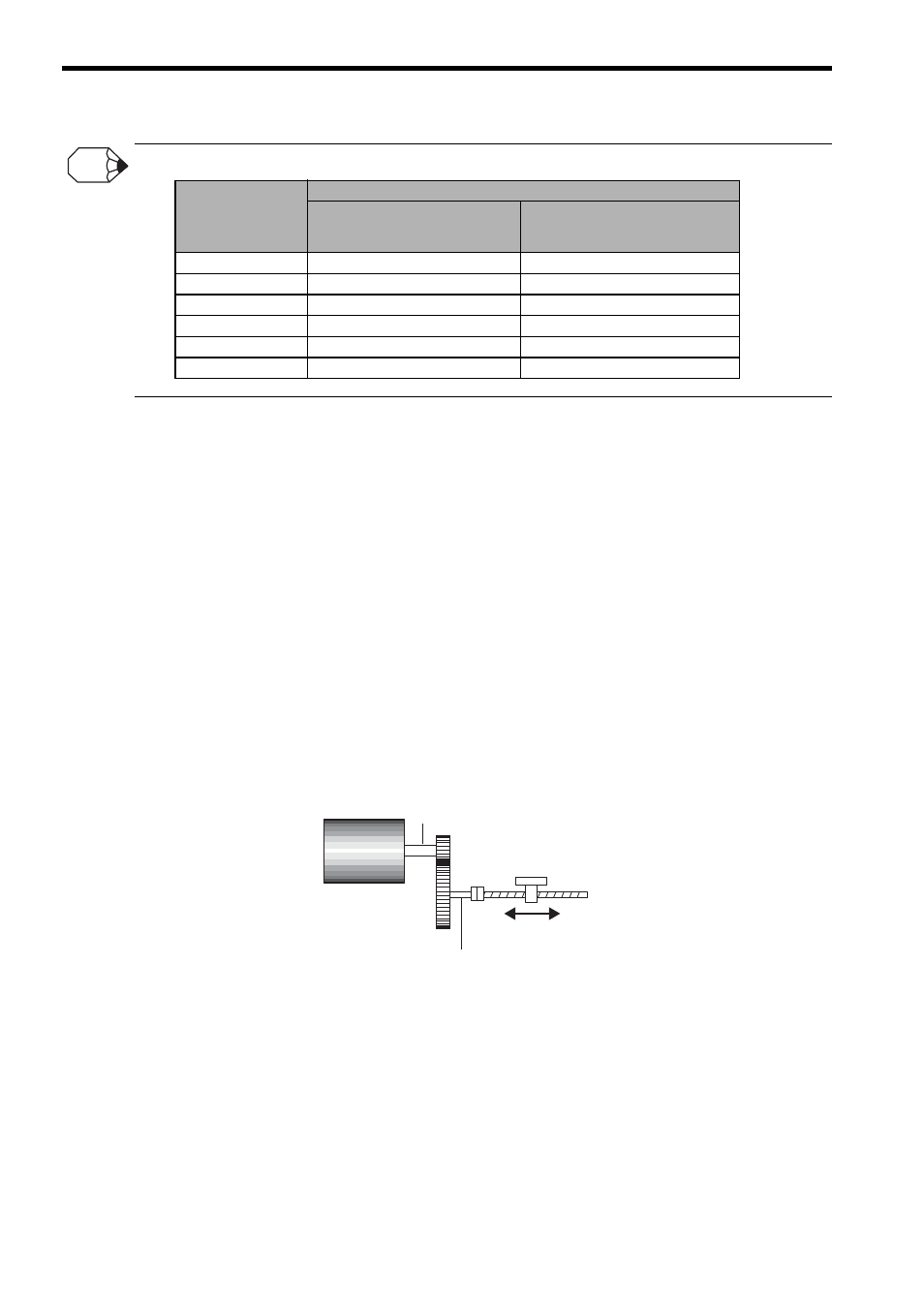
The following setting example uses ball screw and rotating table workpieces.
(1) Parameter Setting Example Using Ball Screw
• Machine specifications: Ball screw axis rotates 5 times for every 7 rotations of the motor axis (Refer to the
following figure.)
• Reference unit: 0.001 mm
To move the workpiece 0.001 mm for 1 reference unit input under the conditions outlined above, i.e., 1 reference
unit = 1 output unit, set the fixed parameters 6, 8, and 9 as follows:
• Fixed Parameter 6: Travel Distance per Machine Rotation = 6 mm/0.001 mm = 6000 (reference units)
• Fixed Parameter 8: Servo Motor Gear Ratio = m = 7
• Fixed Parameter 9: Machine Gear Ratio = n = 5
Note: Set the SERVOPACK gear ratio to 1:1.
Motion Fixed
Parameter 5: Num-
ber of Digits below
Decimal Point
Motion Fixed Parameter 4: Reference Unit Selection
0: pulse
1: mm, 2: deg, 3: inch, 4
μm
0: 0 digit
-2147483648 to 2147483647
-2147483648 to 2147483647
1: 1 digit
-2147483648 to 2147483647
-214748364.8 to 214748364.7
2: 2 digits
-2147483648 to 2147483647
-21474836.48 to 21474836.47
3: 3 digits
-2147483648 to 2147483647
-2147483.648 to 2147483.647
4: 4 digits
-2147483648 to 2147483647
-214748.3648 to 214748.3647
5: 5 digits
-2147483648 to 2147483647
-21474.83648 to 21474.83647
INFO
Ball screw
Workpiece
P (pitch) = 6 mm/rotation
m = 7 rotations
n = 5 rotations
Motor