Yaskawa DeviceNet Option Card CM059 User Manual
Page 42
42
*1 Drive products may provide additional inputs and outputs that are not supported through DeviceNet. For example, G7 has 5
digital outputs; however, only 3 digital outputs are supported through DeviceNet.
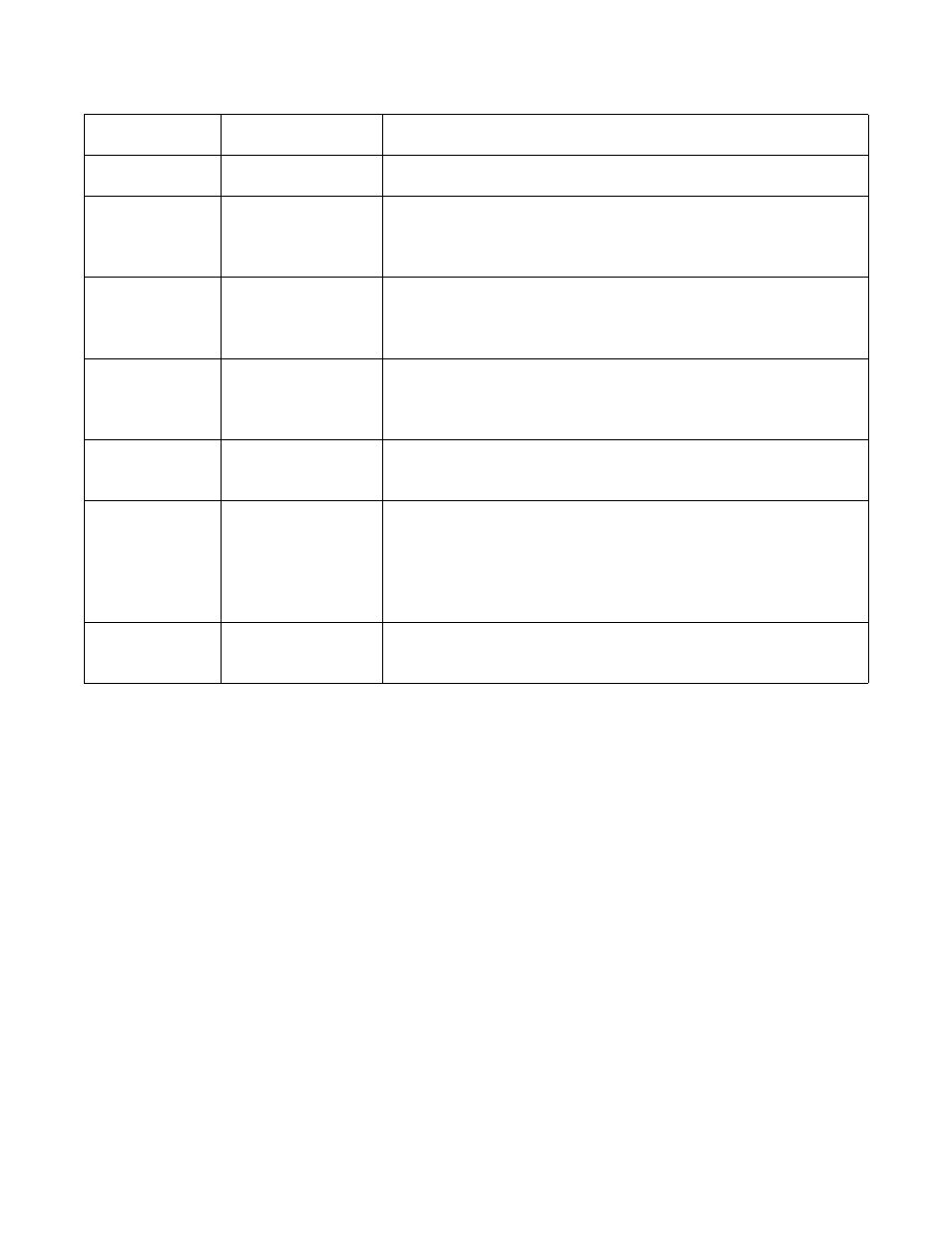
Table 20: Standard Drive Control Instance 101 (65 Hex) (INPUT ASSEMBLY)
*1
(Cont.)
Byte 1, Bit 0
External Fault
External fault (EF0) is input from option.
0: External Fault Off
1: External fault (EF0)
Byte 1, Bit 1
Fault Reset
The drive is reset at fault detection status.
0: Fault reset Off
1: Fault reset
Byte 1, Bit 5
Terminal M1-M2
The drive multi-function output terminal M1-M2 is operated.
Only when “F” is set to the drive parameter H2-01 becomes enabled.
0: Terminal M1-M2 OFF
1: Terminal M1-M2 ON
Byte 1, Bit 6
Terminal M3-M4
The drive multi-function output terminal M3-M4 is operated.
Only when “F” is set to the drive parameter H2-02 becomes enabled.
0: Terminal M3-M4 OFF
1: Terminal M3-M4 ON
Byte 1, Bit 7
Terminal M5-M6
The drive multi-function output terminal M5-M6 is operated.
Only when “F” is set to the drive parameter H2-03 becomes enabled.
0: Terminal M5-M6 OFF
1: Terminal M5-M6 ON
Byte 2, 3
Speed Reference
Drive speed reference is set.
This function is the same as the Speed Reference in Basic Speed Control
Input Instance 20 (14 Hex) section.
Byte 4,5
Torque Reference/
Torque Limit
Sets the torque reference torque limit of the drive. The setting unit is fixed
at 0.1%. Enabled only when the drive is set to the vector control mode with
PG (A1-02=3). When the drive is in the torque control mode (d5-01=1), the
torque reference is enabled. When in the speed control mode (d5-01=0),
functions as the torque limit. When the drive parameter F6-06 is set to 0, it
becomes disabled.
Byte 6,7
Torque Compensation
Sets the drive torque compensation. The setting unit is fixed at 0.1%.
Enabled only when the drive is set into the torque control with Flux Vector
Control mode (A1-02=3).