3 feed-forward control, 4 proportional control – Yaskawa Sigma Mini User Manual
Page 95
2.6Minimizing Positioning Time
— 2-51 —
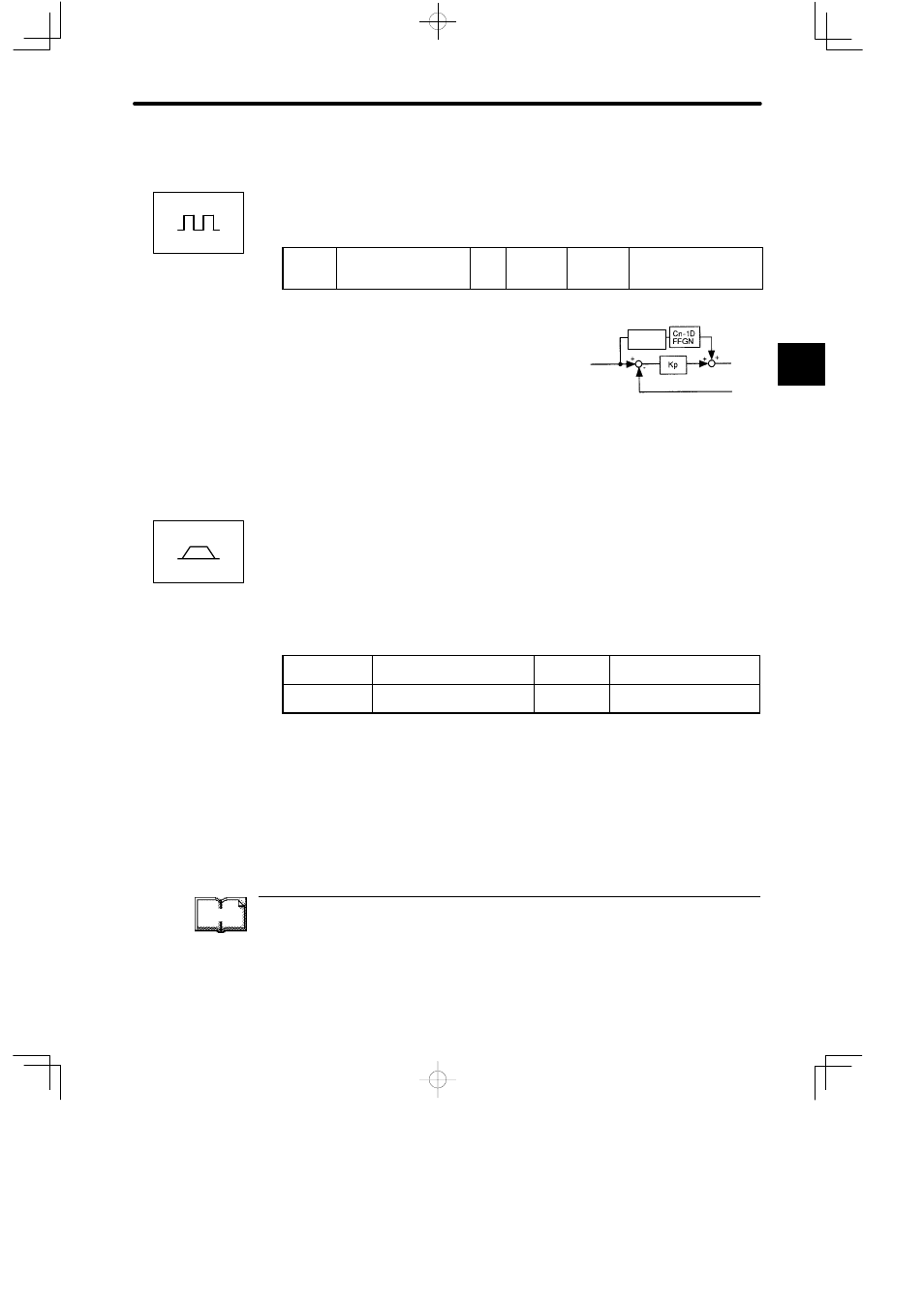
2.6.3 Feed-forward Control
Feed-forward control shortens positioning time. To use feed-forward control, set the follow-
ing parameter.
Cn-1D
FFGN
Feed-forward Gain
Unit:
%
Setting
Range: 0
to 100
Factory
Setting: 0
For Position Control
This parameter is set to apply feed-forward frequency
compensation to position control inside the Servo-
pack.
Use this parameter to shorten positioning time.
Too high a value may cause the machine to vibrate.
For ordinary machines, set 80% or less in this
constant.
2.6.4 Proportional Control
If both bits A and B of memory switch Cn-01 are set to 0 as shown below, input signal /P-CON
serves as a PI/P control changeover switch.
• PI Control: Proportional/Integral control
• P Control: Proportional control
Cn-01 Bit A
Control Mode Selection
Factory
Setting: 0
For Speed/Torque Control
Cn-01 Bit B
Control Mode Selection
Factory
Setting: 0
For Speed/Torque Control
TERMS
Feed-forward control
Control for making necessary corrections beforehand to prevent the control system from
receiving the effects of disturbance.
Using feed-forward control increases effective servo gain, enhancing response perfor-
mance.
2
Positions
Reference
pulse
Differ-
entiation
Feedback pulse
Speed/Torque