Yaskawa CIMR-PU User Manual
Page 56
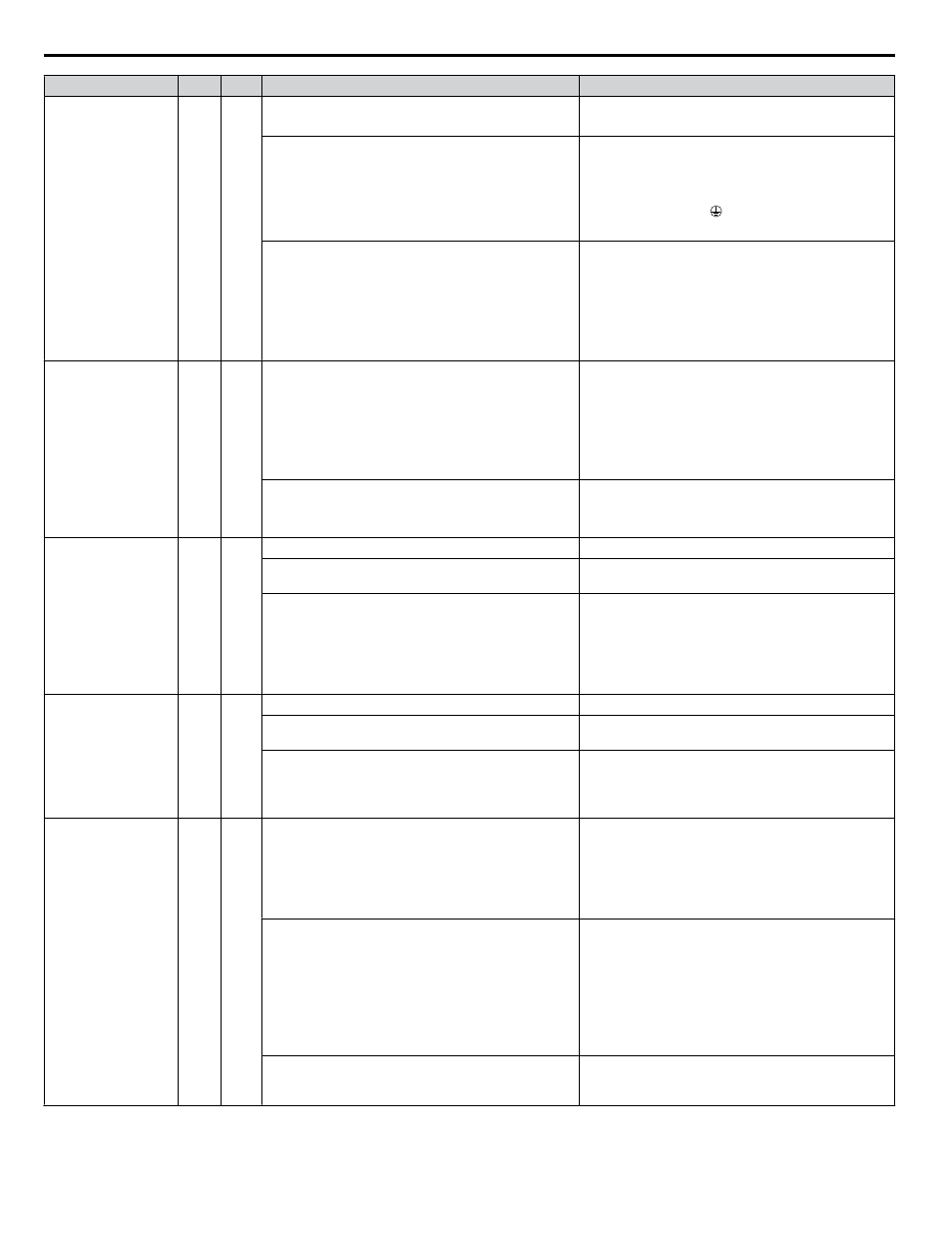
Digital Operator
ALM FLT
Cause
Possible Solution
Overcurrent
oC
O
The motor has been damaged due to overheating or the
motor insulation is damaged
• Check the insulation resistance.
• Replace the motor.
One of the motor cables has shorted out or there is a
grounding problem
• Check the motor cables.
• Remove the short circuit and reapply power to the
drive.
• Check the resistance between the motor cables and
the ground terminal .
• Replace damaged cables.
The load is too heavy
• Measure the current flowing into the motor.
• Replace the drive with a larger capacity drive if the
current value exceeds the rated current.
• Determine if there is sudden fluctuation in the current
level.
• Reduce the load to avoid sudden changes in the
current level or switch to a larger drive.
Heatsink Overheat
oH or oH1
O
O
Surrounding temperature is too high
• Check the temperature surrounding the drive. Verify
temperature is within drive specifications.
• Improve the air circulation within the enclosure panel.
• Install a fan or air conditioner to cool the surrounding
area.
• Remove anything near the drive that might be
producing excessive heat.
Load is too heavy
• Measure the output current.
• Decrease the load.
• Lower the carrier frequency (C6-02).
Motor Overload
oL1
O
Load is too heavy
Reduce the load.
Cycle times are too short during acceleration and
deceleration
Increase the acceleration and deceleration times (C1-01
through C1-04).
A general-purpose motor is driven below the rated speed
with a high load
• Reduce the load.
• Increase the speed.
• If the motor is supposed to operate at low speeds,
either increase the motor capacity or use a motor
specifically designed to operate in the desired speed
range.
Drive Overload
oL2
O
Load is too heavy
Reduce the load.
Cycle times are too short during acceleration and
deceleration
Increase the acceleration and deceleration times (C1-01
through C1-04).
The output voltage is too high
• Adjust the preset V/f pattern (E1-04 through E1-10)
by reducing E1-08 and E1-10.
• Do not lower E1-08 and E1-10 excessively. This
reduces load tolerance at low speeds.
Overvoltage
ov
O
O
Deceleration time is too short and regenerative energy is
flowing from the motor into the drive
• Increase the deceleration time (C1-02 and C1-04).
• Install a dynamic braking resistor or a dynamic
braking resistor unit.
• Set L3-04 to 1 to enable stall prevention during
deceleration. Stall Prevention is enabled as the default
setting.
Fast acceleration time causes the motor to overshoot the
speed reference
• Check if sudden drive acceleration triggers an
overvoltage alarm.
• Increase the acceleration time.
• Use longer S-curve acceleration and deceleration
times.
• Enable the Overvoltage Suppression function (L3-11
= 1).
• Lengthen the S-curve at acceleration end.
Excessive braking load
The braking torque was too high, causing regenerative
energy to charge the DC bus. Reduce the braking torque,
use a dynamic braking option, or lengthen decel time.
i.7 Troubleshooting
56
YASKAWA ELECTRIC TOEP YAIP1U 03B YASKAWA AC Drive – P1000 Safety Precautions