MicroE Mercury II 6000 User Manual
Page 32
Appendix
IM-Mercury_II_6000 Series Rev. 1
Page 31
©2014 MicroE Systems
Mercury
II
6000 Series Encoders
Installation Manual and Reference Guide
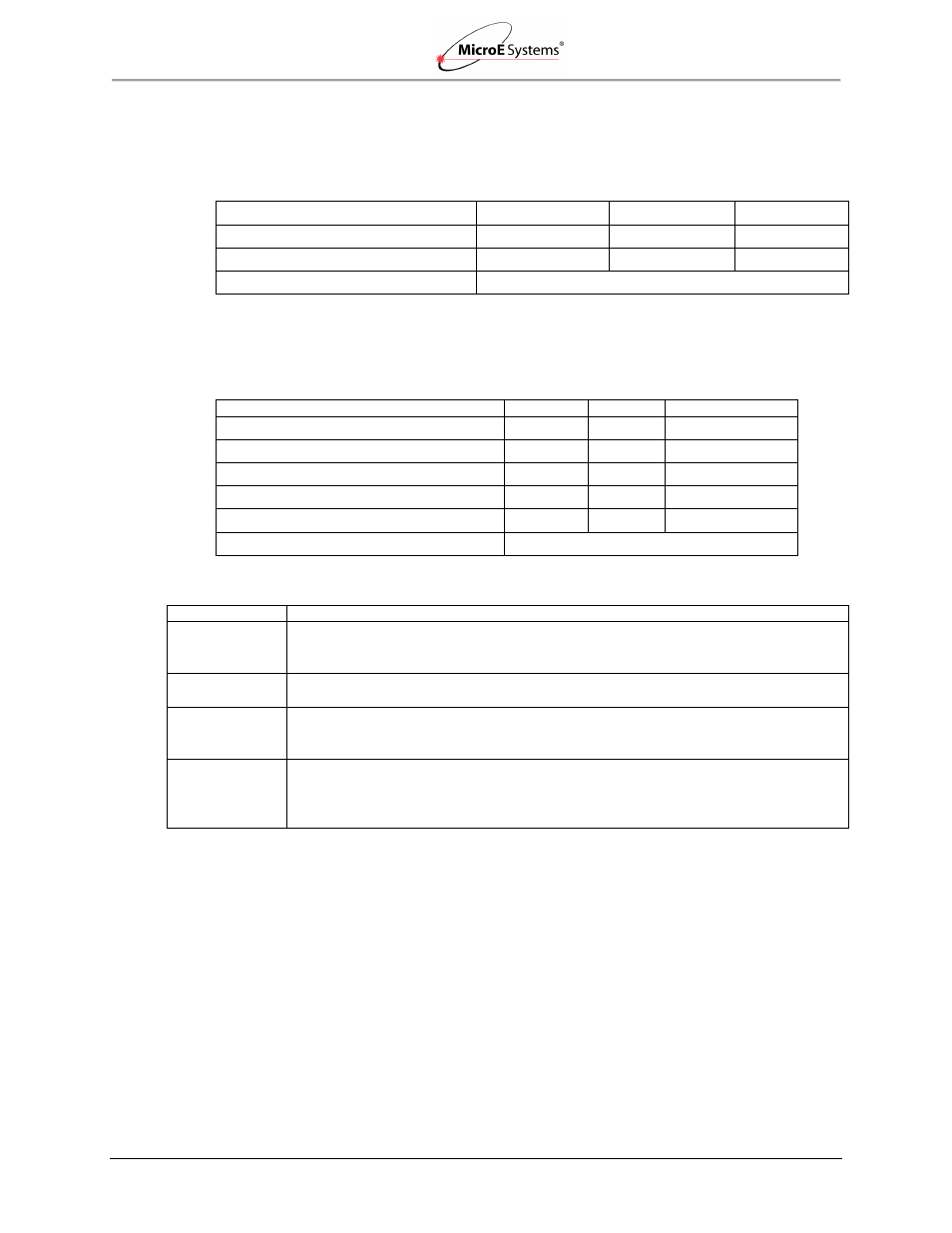
Output Signal Specifications
SDATA_OUT
SCLOCK_OUT
Parameter
Minimum
Typical
Maximum
Differential Output Voltage
500 mv
2v
2.5v
Common Mode Output Voltage
500 mv
2v
2.5v
Termination
120 ohms across each differential pair
Input Signal Specifications
SLOCK_IN
nCS
Parameter
Minimum
Typical
Maximum
Differential Output Voltage
150 mV
Common Mode Output Voltage
1.1v
1.6v
1.9v
Absolute Maximum Single-Ended Voltage
-0.3V
2v
1.9V
Recommended Common Mode Voltage
1.2v
2v
2.5v
Recommended Differential Input Voltage
250 mv
2v
2.5v
Impedance
120 ohm
Signal Definitions
Signal
Definition
SDATA_OUT
The serial data output to the host. The data word consists of 4 start bits, a position word of 4 to
35 bits, 9 bits of status, a 6-bit CRC to provide error detection capability, followed by 4 stop
bits.
SCLOCK_OUT
The output clock is synchronous to the input clock with a phase delay. It is used by the host as
the clock for the serial data output.
SCLOCK_IN
Provided by the host to the sensor and used by the encoder as the system clock.
Note: An interruption in the input clock could cause a loss of encoder position.
Clock frequency requirements: 30MHz to 50MHz
nCS
The host uses this line to initiate a position sample. The nCS logic is “negative true”. Each
time the sensor detects a falling edge on this signal, a position sample is sent to the host.
Maximum position sample frequency (falling edge to falling edge): 220 clock cycles
Minimum Pulse Width (high or low): 2 clock cycles
Power-Up Sequence
Power is supplied from the host to the sensor. After power is supplied, the following sequence is
performed:
The sensor waits for the serial clock to be provided by the host on the signal SCLOCK_IN
for 100ms.
If a clock is not provided, the sensor switches to operate in the final mode (quadrature or
serial).
Upon detecting a serial clock on SCLOCK_IN, the sensor returns the clock to the host on
SCLOCK_OUT.
Within the first 500ms after the serial clock is provided by the host, SCLOCK_OUT may
be unstable.