Yaskawa SI-EN3D User Manual
Page 33
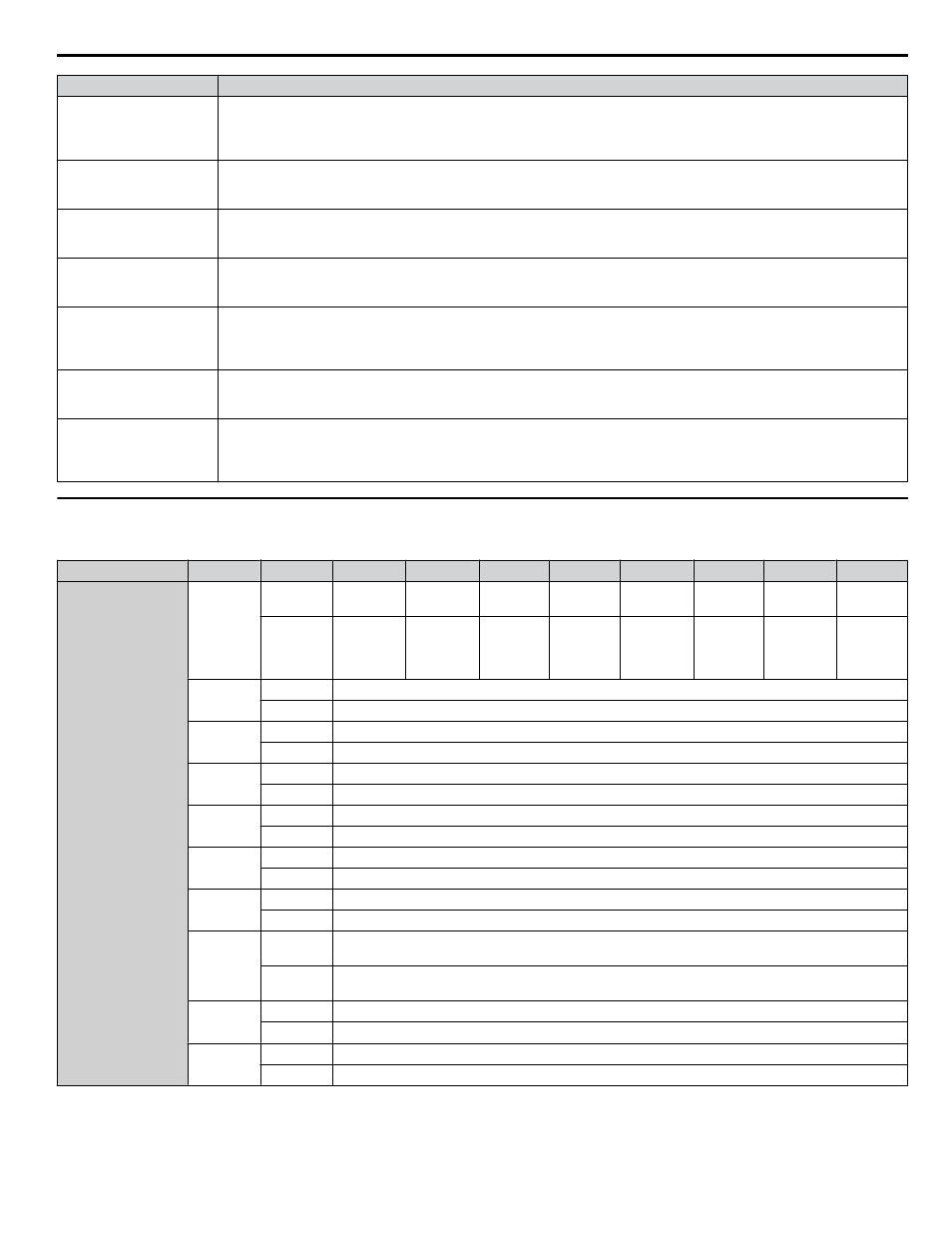
Name
Description
Multi-Function Digital
Output
Terminal M1/M2
0: M1/M2 OFF
1: M1/M2 ON
This function is enabled only when H2-01 is set to F.
Multi-Function
Photocoupler 1
Terminal P1
0: Terminal P1 OFF
1: Terminal P1 ON
Multi-Function
Photocoupler 2
Terminal P2
0: Terminal P2 OFF
1: Terminal P2 ON
ZSV
Zero Servo Completed
0: –
1: Completed
Output Frequency
Actual Drive Speed
Monitors drive output frequency.
Unit depends on o1-03.
Unit is not affected by Speed Scale SS.
Torque Actual
Output Torque
Shows the Torque Reference.
Value displays in 0.1% units.
Current Actual
Actual Output Current
Monitors drive output current.
Unit is 0.01 A.
Unit is not affected by Current Scale CS.
u
Extended Speed/Torque Status Input (Vendor Specific Yaskawa Electric (YE) Assy) -
155 (0x9B)
Output Instance
Word
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
155
0
0
Faulted
Alarm
Ready
Speed
Agree
Fault Reset
REV
Running
ZSP
Running
1
ZSV
–
Multi-
Function
Photo-
coupler 2
Multi-
Function
Photo-
coupler 1
Multi-
Function
Digital
Output
LOCAL/
REMOTE
Uv
oPE
1
2
Motor Speed (Low Byte)
3
Motor Speed (High Byte)
2
4
Torque Actual (Low Byte)
5
Torque Actual (High Byte)
3
6
PG Count Value (Low Byte)
7
PG Count Value (High Byte)
4
8
Frequency Command (Low Byte)
9
Frequency Command (High Byte)
5
10
Output Frequency (Low Byte)
11
Output Frequency (High Byte)
6
12
Output Current (Low Byte)
13
Output Current (High Byte)
7
14
Parameter F7-35
Default: Terminal A2 Input (Low Byte)
15
Parameter F7-35
Default: Terminal A2 Input (High Byte)
8
16
Main Circuit DC Voltage (Low Byte)
17
Main Circuit DC Voltage (High Byte)
9
18
Error Code (Low Byte)
19
Error Code (High Byte)
9 Input Assemblies (Drive Produces)
YASKAWA SIEP YAICOM 16A 1000-Series Option Dual-Port EtherNet/IP SI-EN3D Technical Manual
33