Flagged, Refer to high, For details – Yaskawa SI-EN3D User Manual
Page 36
u
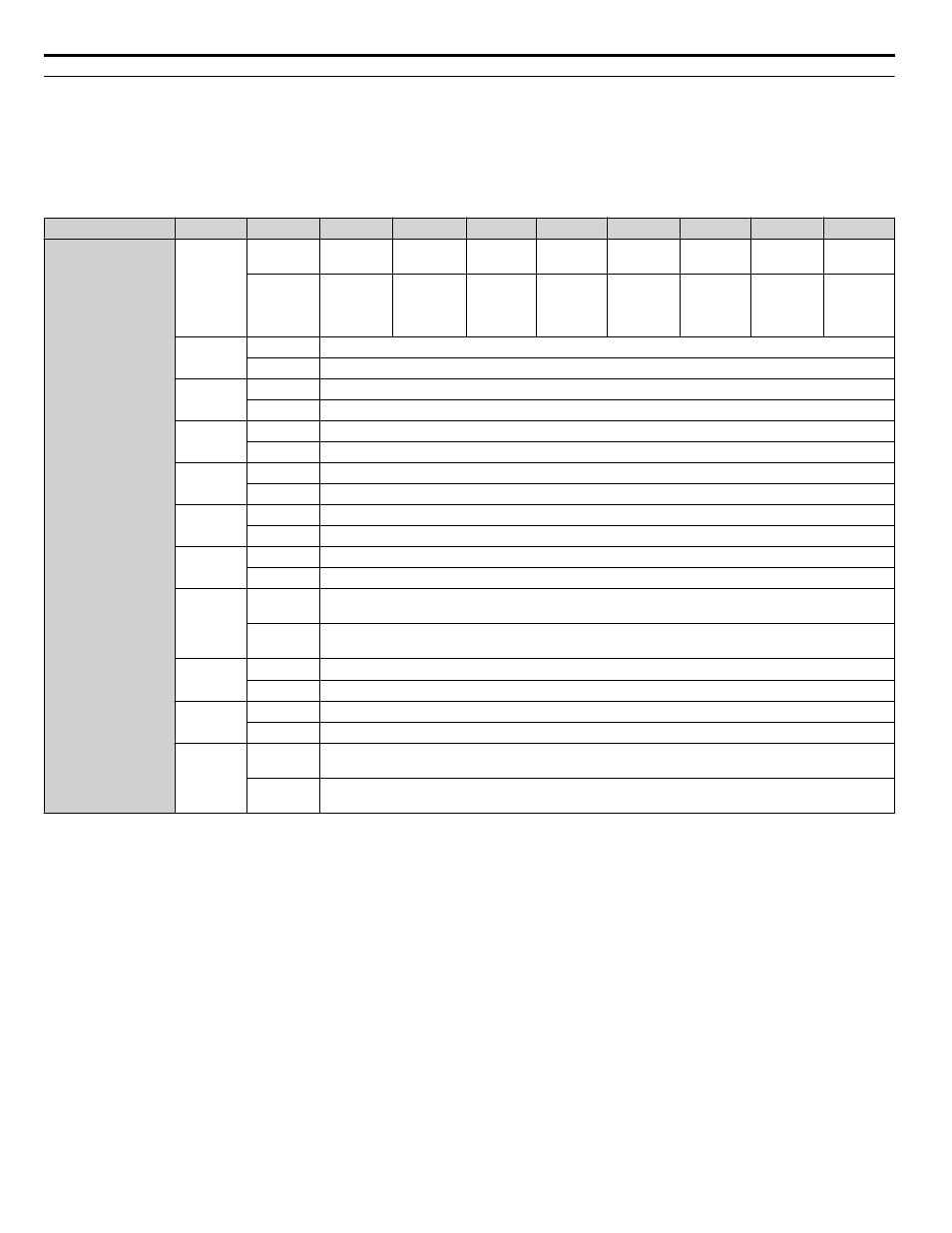
High Speed/Torque Status Input (Vendor Specific Yaskawa Electric (YE) Assy) - 166
(0xA6)
If an error occurs while trying to read from the dynamic parameters, the appropriate error bit in Assembly 166 will be set. If
more information about the nature of the error is needed, the extended error status can be read explicitly through Class 4,
Instance 0xA6, Attribute 0x64. This will return 20 Bytes with each dynamic parameter in Assembly 166 having a Byte
dedicated to its extended error status.
Output Instance
Word
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
166
0
0
Faulted
Alarm
Ready
Speed
Agree
Fault Reset
REV
Running
ZSP
Running
1
ZSV
–
Multi-
Function
Photo-
coupler 2
Multi-
Function
Photo-
coupler 1
Multi-
Function
Digital
Output
LOCAL/
REMOTE
Uv
oPE
1
2
Motor Speed (Low Byte)
3
Motor Speed (High Byte)
2
4
Torque Actual (Low Byte)
5
Torque Actual (High Byte)
3
6
PG Count Value (Low Byte)
7
PG Count Value (High Byte)
4
8
Frequency Command (Low Byte)
9
Frequency Command (High Byte)
5
10
Output Frequency (Low Byte)
11
Output Frequency (High Byte)
6
12
Output Current (Low Byte)
13
Output Current (High Byte)
7
14
Parameter F7-35
Default: Terminal A2 Input (Low Byte)
15
Parameter F7-35
Default: Terminal A2 Input (High Byte)
8
16
Main Circuit DC Voltage (Low Byte)
17
Main Circuit DC Voltage (High Byte)
9
18
Error Code (Low Byte)
19
Error Code (High Byte)
10
20
<1>
Parameter F7-33
Default: Alarm Code (Low Byte)
21
<1>
Parameter F7-33
Default: Alarm Code (High Byte)
9 Input Assemblies (Drive Produces)
36
YASKAWA SIEP YAICOM 16A 1000-Series Option Dual-Port EtherNet/IP SI-EN3D Technical Manual