4 pi control instruction (pi) – Yaskawa Ladder Works Programming Manual User Manual
Page 130
7.4 PI CONTROL Instruction (PI)
7-9
7.4 PI CONTROL Instruction (PI)
[Outline]
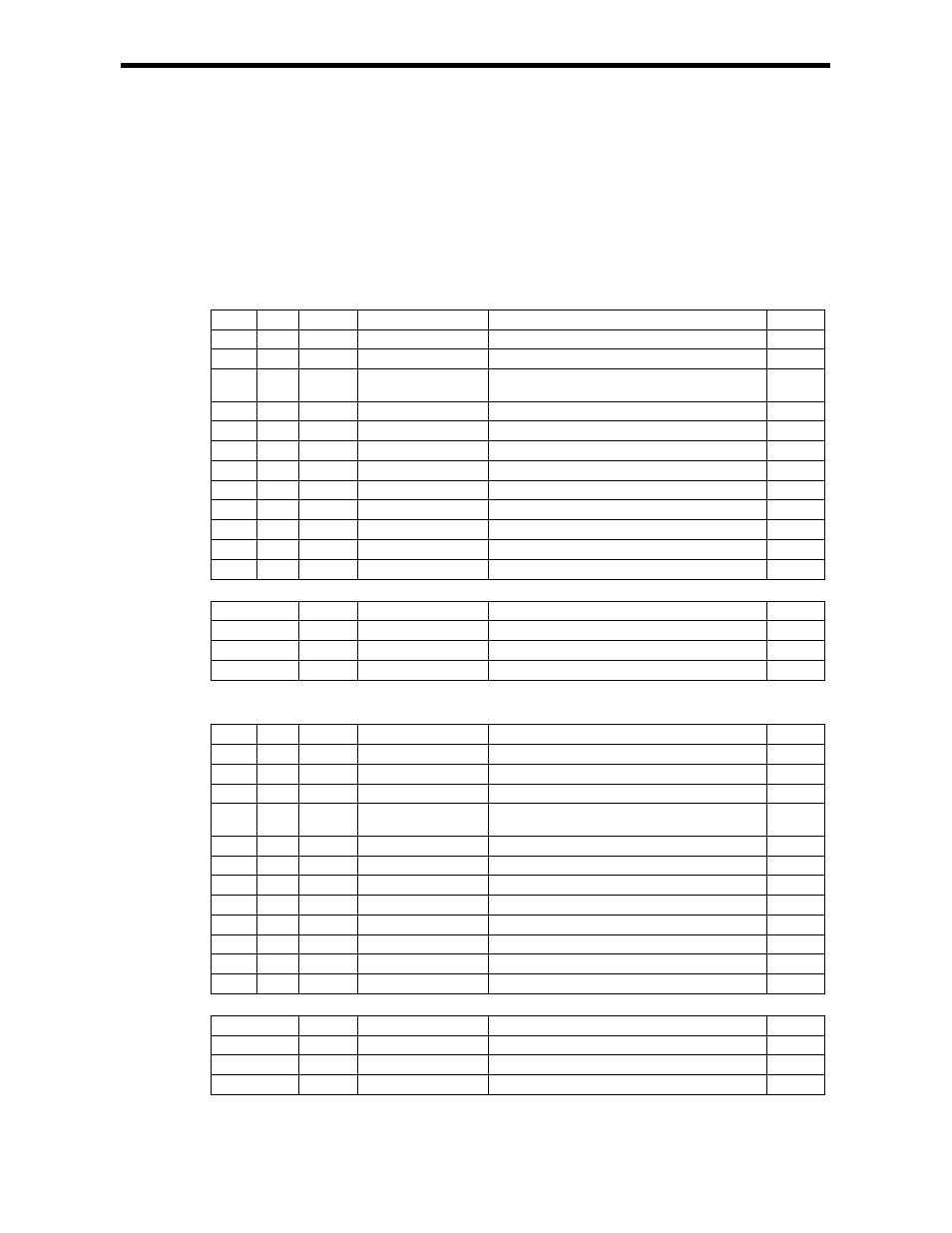
The PI instruction executes a PI control operation according to the contents of a previously set
parameter table. The input (Input) to the PI operation must be integer or real number data. Double-
length integer data cannot be used. The configurations of the parameter tables for integer and real
number data are different. Operations are performed by processing each parameter as an integer
consisting of the lower-place 16 bits.
Table of Integer Type PI Instruction Parameters
ADR
Type Symbol
Name
Specification
I/O
0
W
RLY
Relay I/O
Relay input, relay output *
1
IN/OUT
1
W
Kp
P gain
Gain of the P correction (a gain of 1 is set to 100)
IN
2 W Ki
Integration
adjustment
gain
Gain of the integration circuit input (a gain of 1 is
set to 100)
IN
3
W
Ti
Integration time
Integration time (ms)
IN
4
W
IUL
Upper integration limit
Upper limit for the I correction value
IN
5
W
ILL
Lower integration limit
Lower limit for the I correction value
IN
6
W
UL
Upper PI limit
Upper limit for the P+I correction value
IN
7
W
LL
Lower PI limit
Lower limit for the P+I correction value
IN
8
W
DB
PI output dead band
Width of the dead band for the P+I correction value
IN
9
W
Y
PI output
PI correction output (also output to the A register)
OUT
10
W
Yi
I correction value
Storage of the I correction value
OUT
11
W
IREM
I remainder
Storage of the I remainder
OUT
*
1
: Relay I/O Bit Assignment
BIT
Symbol
Name
Specification
I/O
0
IRST
Integration reset
"ON" is input when integration is reset.
IN
1 to 7
-
(Reserve)
Reserve relay for input
IN
8 to F
-
(Reserve)
Reserve relay for output
OUT
Table of Real Type PI Instruction Parameters
ADR
Type Symbol
Name
Specification
I/O
0
W
RLY
Relay I/O
Relay input, relay output
*1
IN/OUT
1 W
-
(Reserve) Reserve
register
-
2
F
Kp
P gain
Gain of the P correction
IN
4 F Ki
Integration
adjustment
gain
Gain of the integration circuit input
IN
6
F
Ti
Integration time
Integration time (s)
IN
8
F
IUL
Upper integration limit
Upper limit for the I correction value
IN
10
F
ILL
Lower integration limit
Lower limit for the I correction value
IN
12
F
UL
Upper PI limit
Upper limit for the P+I correction value
IN
14
F
LL
Lower PI limit
Lower limit for the P+I correction value
IN
16
F
DB
PI output dead band
Width of the dead band for the P+I correction value
IN
18
F
Y
PI output
PI correction output (also output to the A register)
OUT
20
F
Yi
I correction value
Storage of the I correction value
OUT
*
1
: Relay I/O Bit Assignment
BIT
Symbol
Name
Specification
I/O
0
IRST
Integration reset
"ON" is input when integration is reset.
IN
1 to 7
-
(Reserve)
Reserve relay for input
IN
8 to F
-
(Reserve)
Reserve relay for output
OUT