Yaskawa Ladder Works Programming Manual User Manual
Page 134
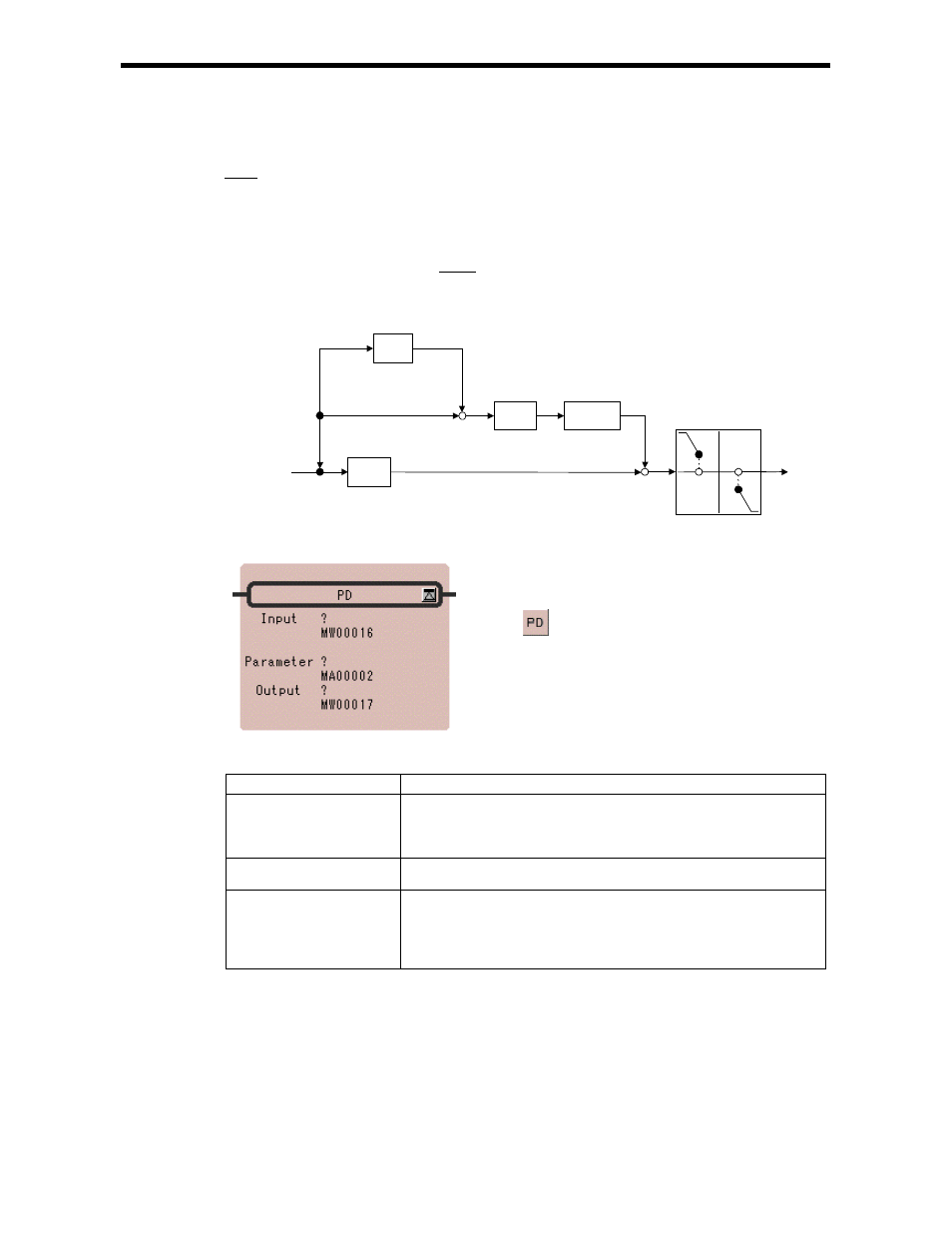
7.5 PD CONTROL Instruction (PD)
7-13
Here, the PD operation is expressed as follows:
Y
X
= Kp + Kd×Td×S
X : deviation input value
Y : output value
The following operation is performed within the PD instruction:
Td
Y = Kp×X + Kd× ( X – X' )×
Ts
X' : previous input value
Ts : scan time set value
Input
X
Kp
Output
Y
LIMIT
DB
Z
-1
+
-
+
+
Kd
Td/Ts
[Format]
Symbol : PD
Full Name : PD Control
Category : DDC
Icon :
[Parameter]
Parameter Name
Setting
Input
· Any integer type and real number type register
· Any integer type and real number type register with subscript
· Subscript register
· Constant
Parameter
· Register address (except for # and C registers)
· Register address with subscript (except for # and C registers)
Output
· Any integer type and real number type register (except for # and C
registers)
· Any integer type and real number type register with subscript (except for #
and C registers)
· Subscript register