3 related parameters – Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Command Option Interface User Manual
Page 213
5 Adjustments
5.7.3 Related Parameters
5-54
(3) Related Function on Vibration Suppression Function
This section describes functions related to vibration suppression function.
Feedforward
The feedforward gain (Pn109), speed feedforward input, and torque feedforward input will be disabled in the
factory setting.
Set Pn140.3 to 1 if model following control is used together with the speed feedforward input and torque feed-
forward input from the host controller (through the command option module).
For details on the speed feedforward input and the torque feedforward input, refer the the manual of the con-
nected command option mocule.
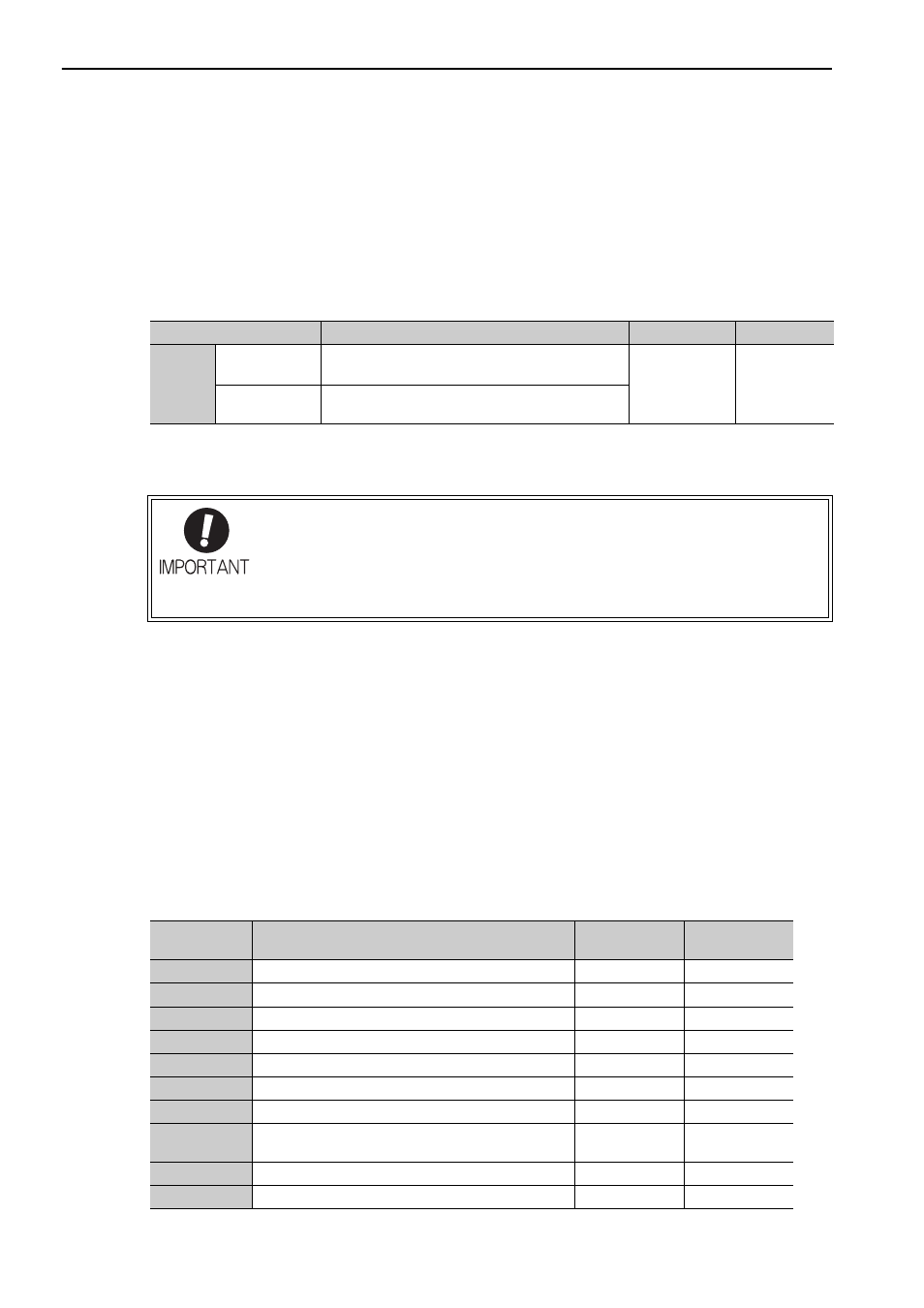
5.7.3 Related Parameters
The following table lists parameters related to this function and their possibility of being changed while exe-
cuting this function or of being changed automatically after executing this function.
• Parameters related to this function
These are parameters that are used or referenced when executing this function.
• Allowed changes during execution of this function
Yes : Parameters can be changed using SigmaWin+ while this function is being executed.
No : Parameters cannot be changed using SigmaWin+ while this function is being executed.
• Automatic changes after execution of this function
Yes : Parameter set values are automatically set or adjusted after execution of this function.
No : Parameter set values are not automatically set or adjusted after execution of this function.
Parameter
Function
When Enabled Classification
Pn140
n.0
[Factory setting]
Model following control is not used together with the
speed/torque feedforward input.
Immediately
Tuning
n.1
Model following control is used together with the
speed/torque feedforward input.
• Model following control is used to make optimum feedforward settings in the SERVO-
PACK when model following control is used with the feedforward function. Therefore,
model following control is not normally used together with either the speed feedfor-
ward input or torque feedforward input from the host controller. However, model fol-
lowing control can be used with the speed feedforward input or torque feedforward
input if required. An improper feedforward input may result in overshooting.
Parameter
Name
Mid-execution
changes
Automatic
changes
Pn140
Model Following Control Related Switch
Yes
Yes
Pn141
Model Following Control Gain
No
Yes
Pn142
Model Following Control Gain Compensation
No
No
Pn143
Model Following Control Bias (Forward Direction)
No
No
Pn144
Model Following Control Bias (Reverse Direction)
No
No
Pn145
Vibration Suppression 1 Frequency A
No
Yes
Pn146
Vibration Suppression 1 Frequency B
No
Yes
Pn147
Model Following Control Speed Feedforward Compen-
sation
No
No
Pn14A
Vibration Suppression 2 Frequency
No
No
Pn14B
Vibration Suppression 2 Compensation
No
No