1 system configuration, M-ii – Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Command Option Interface User Manual
Page 274
8 Fully-closed Loop Control
8.1.1 System Configuration
8-2
8.1 System Configuration and Connection Example for
SERVOPACK with Fully-closed Loop Control
This section describes the system configuration and connection example for the SERVOPACK with fully-
closed loop control.
8.1.1 System Configuration
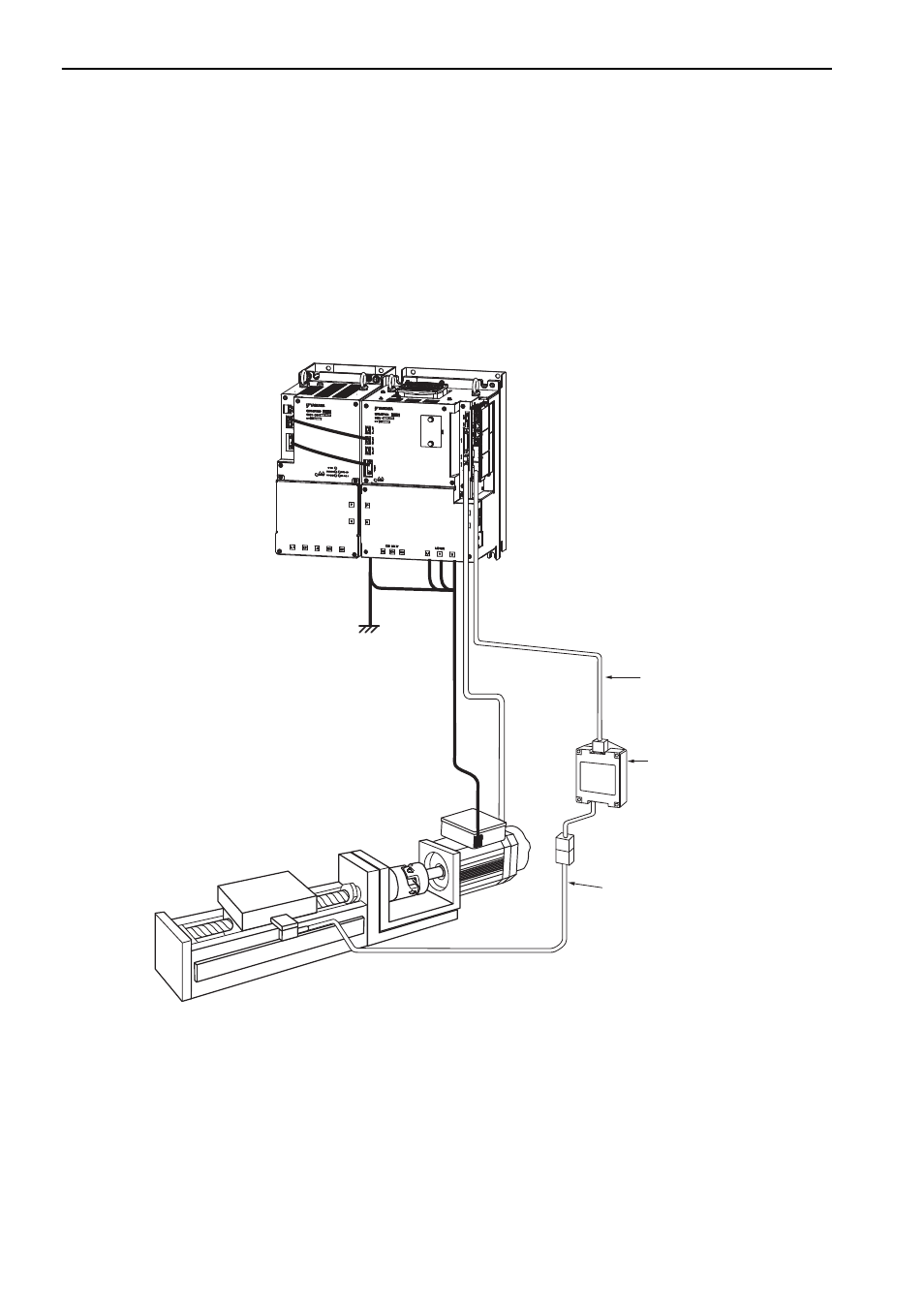
The following figure shows an example of the system configuration.
Note 1. The figure above shows a connection example of an external encoder. Refer to 1.7 Examples of Servo System
Configurations for details on the power supply and peripheral devices.
2. In fully-closed loop control, rattling or twisting of mechanical parts may cause vibration, delaying the positioning
process.
ޓ
SERVOPACK with Fully-closed Module
Servomotor main
circuit cable
Connection cable for
serial converter unit
External encoder cable
Serial converter unit
Model: JZDP-D00 -000-E
External encoder
(Not included)
M-II