Shows – Adept Python User Manual
Page 163
Description
Adept Python Modules User’s Guide, Rev. E
163
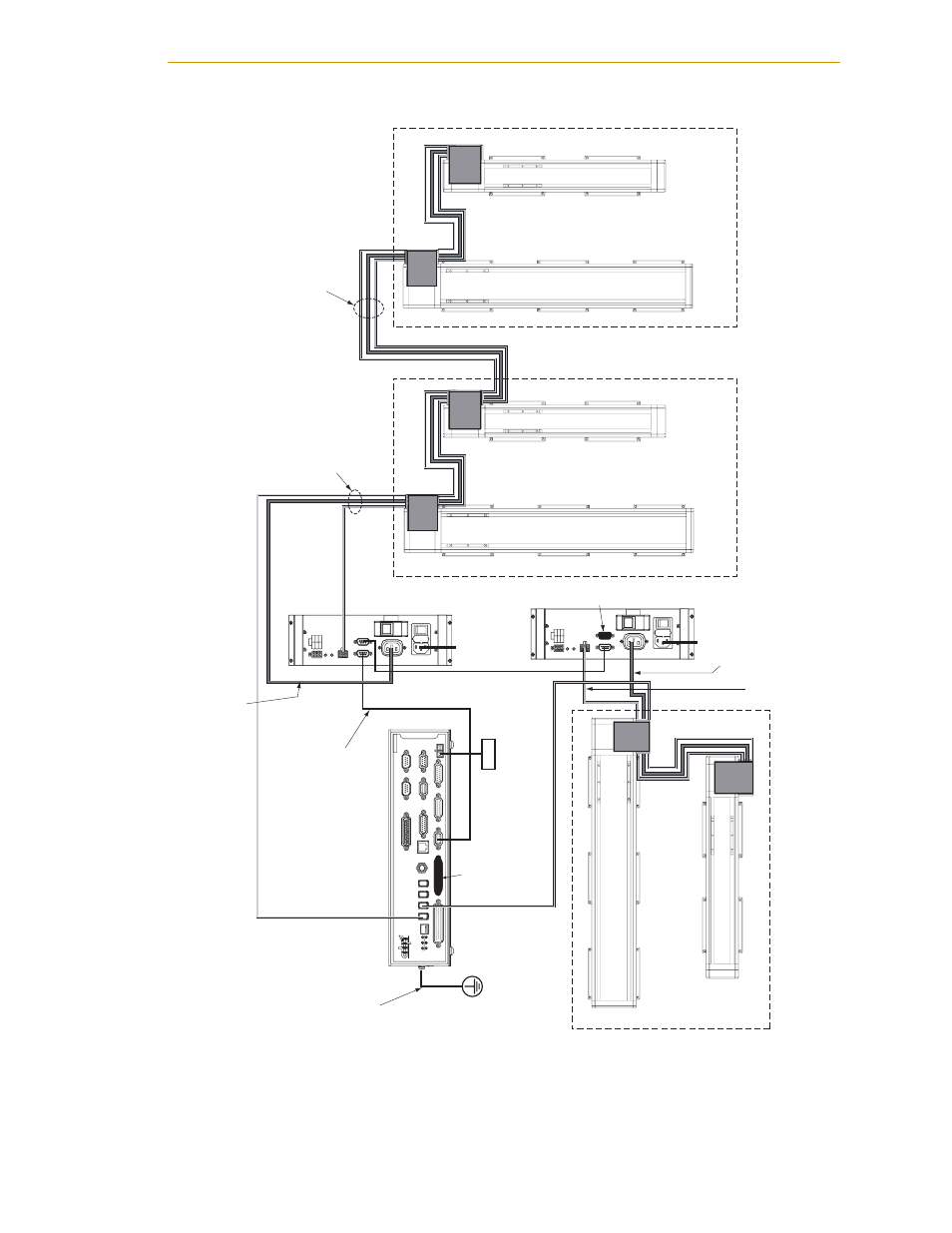
Figure 12-2. System Installation with Three Linear Module Robots and Two PDUs
R
ON
Smar
tSer
v
o
IEEE-1394
1 2 3 4
SF
ES
HD
SW1
1.1
1
.2
2.1
2
.2
OK
12
3
XDIO
LAN
HPE
OFF
XSYS
CAMERA
Eth 10/100
XUSR
De
vice Net
XFP
RS-232/TERM
RS-232-1
XMCP
BEL
T ENCODER
SmartController CX
-+
-+
RS-422/485
XDC1
XDC2
24V
5A
*S/N 3562-XXXXX*
RS-232-2
AMP
PWR
XDCS
PWR
AC
AMP
ES2
IN
1
AU
X
ES1
XSL
V
1/
AC
CH1 CH2
24V
A
U
X DC RESET
XSL
V
2
PDU3
2
AMP DC RESET
C
I
R
C
U
I
T
B
R
E
A
K
E
R
AMP
PWR
XDCS
PWR
AC
AMP
ES2
IN
1
AU
X
ES1
XSL
V1/
AC
CH1 CH2
24V
A
U
X DC RESET
XSL
V
2
PDU3
2
AMP DC RESET
C
I
R
C
U
I
T
B
R
E
A
K
E
R
Smar
tController CX
AC
I
n
AC
I
n
IEEE 1394 Cab
le
IEEE 1394 Cab
le
Controller XSYS
to PDU3 XSL
V1
XSL
V2
to XSL
V1
User-Supplied
Ground Wire
24VDC Cab
le
24VDC
Cab
le
Switched A
C
P
o
w
e
r Cab
le
Switched A
C
P
o
w
er Cab
le
User-Supplied
24VDC P
o
w
er
Supply
T
e
rm
inator
Installed
T
e
rm
inator
Installed
PDU3 #1
Robot #1
Robot #3
Robot #2
Controller to Amp
Cab
le Kit (4.5M)
Amp to Amp
Cab
le Kit
(ordered separ
ately)
PDU3 #2
Note:
F
ront P
anel,
pendant, and User-
Supplied PC not sho
wn.
If pendant not used,
m
u
st install ter
minator
in XMCP
.