Adept Python User Manual
Page 62
Chapter 4 - Python Theta Module Description
62
Adept Python Modules User’s Guide, Rev. E
• ±360 degrees of motion (continuous turn operation available)
• Mounting option on L08 module carriage or L08 module body
All external dimension and weight specifications for each module type can be found on
the module specification drawings located on the Adept website.
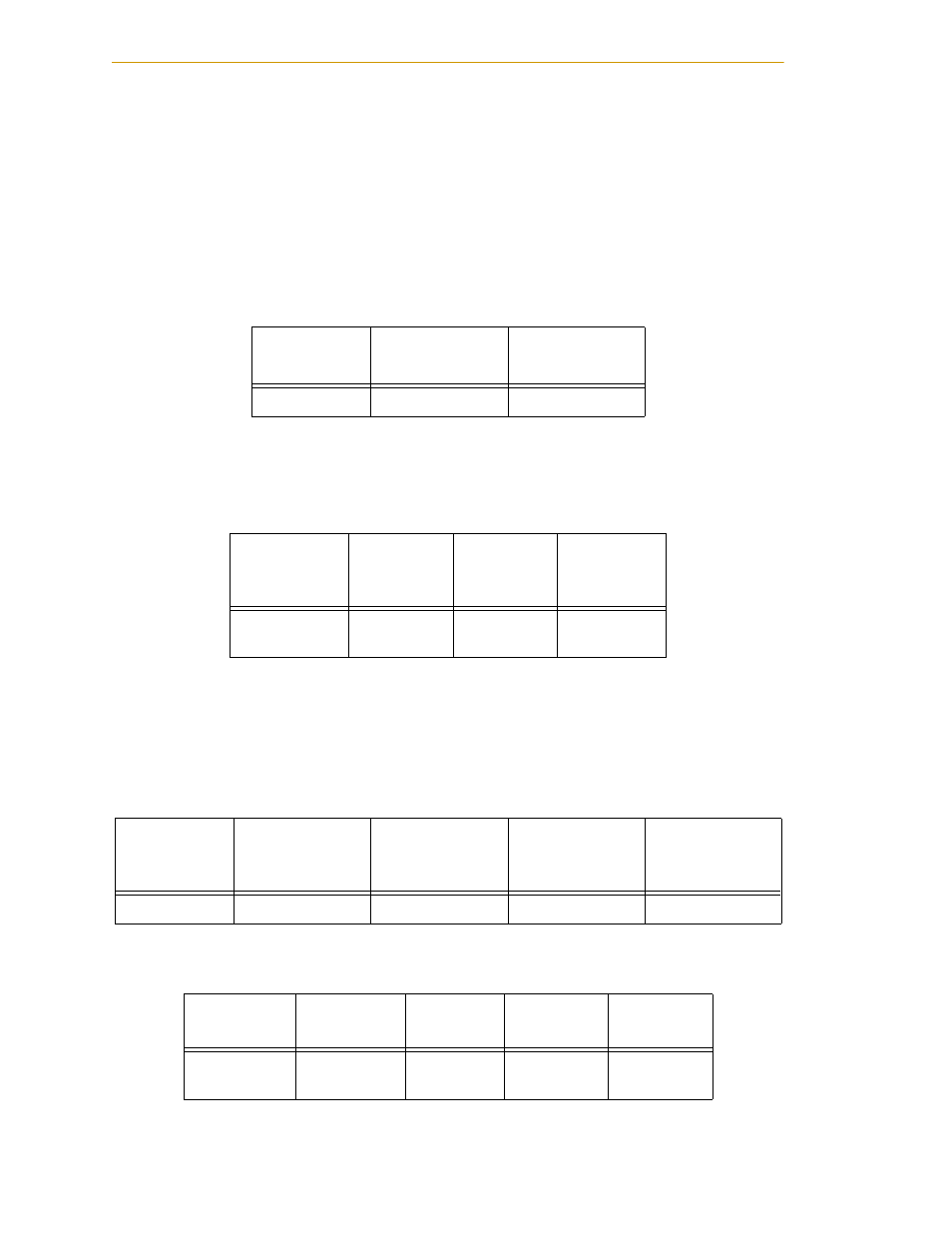
The LT1 Theta module utilizes heavy duty radial ball bearings to support its output shaft.
The basic load ratings for these bearings are given in the following table.
The motor used in the LT1 Theta module is a high-quality AC motor manufactured by
Yaskawa corporation. These motors employ serial absolute encoders. The motor model
numbers, size, maximum torque values, and encoder resolution are provided here for
reference.
Table 4-1. Output Shaft Bearing Static and Dynamic Load Ratings
Module Type
C
a
(N)
a
Basic Dynamic load rating
Co
b
(N)
b
Basic Static load rating
LT1
10,100
5850
Table 4-2. Carriage Maximum Payload and Transportable Moments
Module Type
Payload (kg)
Payload
Moment
(kg-cm)
Load Inertia
(kg-cm
2
)
LT1
5.0 (max) /
2.0 (rated)
40.0 (max)
350 (max) /
150 (rated)
Table 4-3. Motors Used in Python LT1 Modules
Module Type
Motor Type
Motor Size
(Watts)
Peak Torque
(N-m)
Encoder
Resolution
(Cnts/Rev)
LT1
Sigma-II
50
0.48
65,536
Table 4-4. LT1 Module Acceleration, Speed, Torque, and Repeatability
Module Type
Acceleration
(deg/sec)
Speed
(deg/sec)
Torque (N-m)
Repeatability
(deg)
LT1
8000 (max)
1000 (max)
400 (rated)
9.0 (max)
4.0 (rated)
±0.1