Yaskawa DeviceNet Option Card CM05x User Manual
Page 38
Configuration of Drive DeviceNet Parameters 6-3
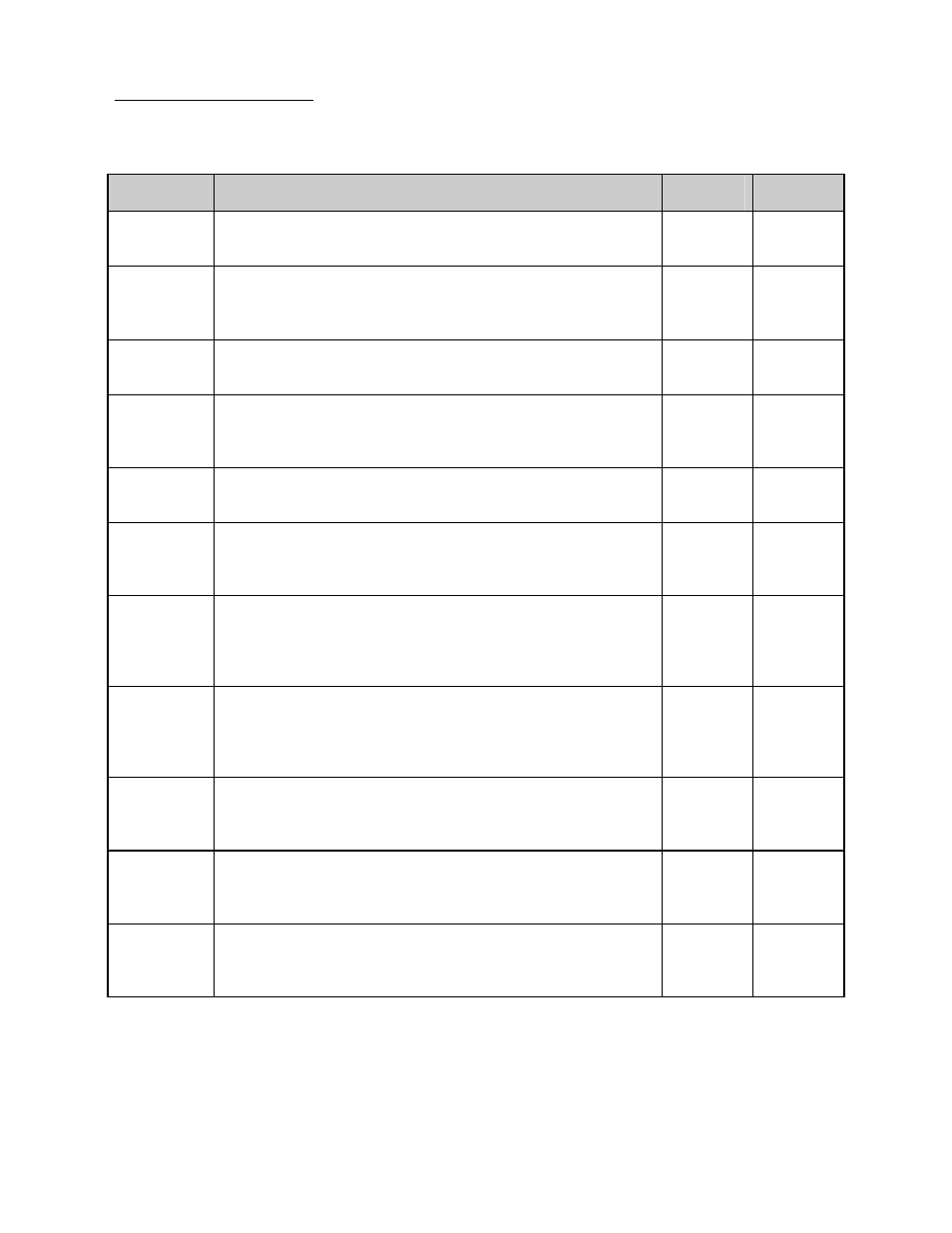
The Polled Consuming Assembly (PCA) parameter determines the format of the data that is transmitted from the
Master device to the Drive. The PCA data is transmitted from the Master device to a Drive with a Poll Command
message. The PCA data is used to control the operation of the Drive. One of the assemblies from the following
table must be selected. See Appendix B for details of the assemblies.
Assembly
Number
Assembly
Definition
# of Data
Bytes
Execution
Time
20 *
1
Basic Speed Command
This assembly provides: run forward, fault reset, and speed
reference in RPM.
4 x
msec
21
Extended Speed Command
This assembly provides: run forward, run reverse, fault reset,
network control enable, network reference enable, and speed
reference in RPM.
4 x
msec
22
Basic Speed/Torque Command
This assembly provides: run forward, fault reset, speed
reference in RPM, and torque reference in N-m.
6 x
msec
23
Extended Speed/Torque Command
This assembly provides: run forward, run reverse, fault reset,
network control enable, network reference enable, speed
reference in RPM, and torque reference in N-m.
6 x
msec
120
*
2
Speed Command 1
Assembly provides: run forward, run reverse, multi-function
inputs, external fault, fault reset, and speed reference in Hz.
4 x
msec
121 *
2
Torque Command 1
This assembly provides: run forward, run reverse, multi-
function inputs, external fault, fault reset, and torque reference
in % of rated torque.
4 x
msec
122 *
2
Speed Command 2
This assembly provides: run forward, run reverse, multi-
function inputs, external fault, fault reset, speed reference in
Hz, network reference selection, and network control
selection.
6 x
msec
123 *
2
Torque Command 2
This assembly provides: run forward, run reverse, multi-
function inputs, external fault, fault reset, torque reference in
% of rated torque, network reference selection, and network
control selection.
6 x
msec
124 *
2
Speed Command 3
This assembly provides: run forward, run reverse, multi-
function inputs, speed reference in Hz, and access to Drive
parameters.
8 x
msec
125 *
2
Torque Command 3
This assembly provides: run forward, run reverse, multi-
function inputs, and torque reference in % of rated torque, and
access to Drive parameters.
8 x
msec
126 *
2
Speed and Torque Command
This assembly provides: run forward, run reverse, multi-
function inputs, speed reference in Hz, torque reference in %
of rated torque, and torque compensation in % of rated torque.
8 x
msec
*
1
Assembly 20 is the default Polled Consuming Assembly.
*
2
Yaskawa specific Polled Consuming Assembly.