Yaskawa DeviceNet Option Card CM05x User Manual
Page 39
Configuration of Drive DeviceNet Parameters 6-4
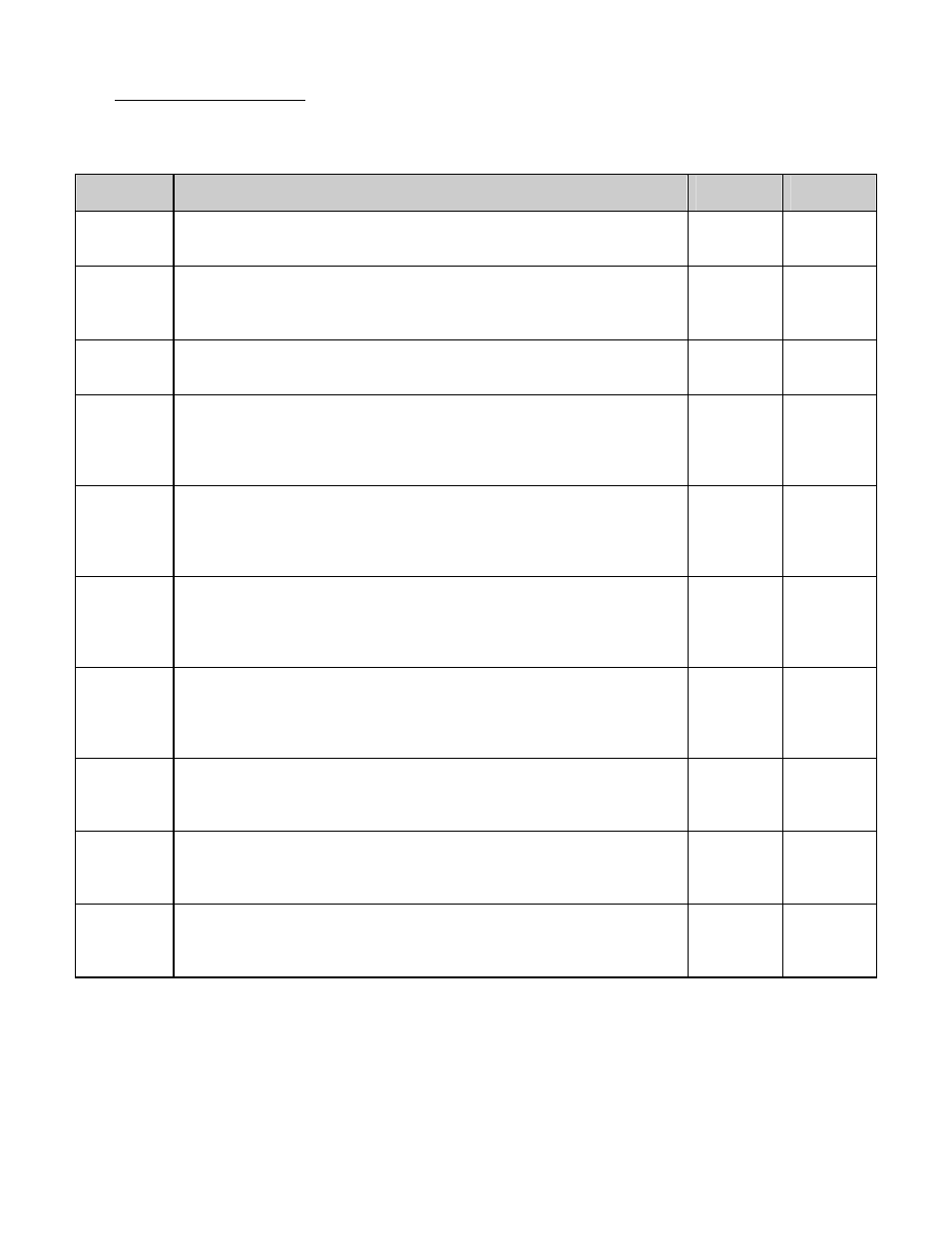
The Polled Producing Assembly (PPA) parameter determines the format of the data that is transmitted from the
Drive to the Master device. The PPA data is transmitted from the Drive to the Master device with a Polled
Response message. The PPA data is used to return the status of the Drive to the Master device. One of the
assemblies from the following table must be selected. See Appendix B details of the assemblies.
Assembly
Number
Assembly
Definition
# of Data
Bytes
Execution
Time
70*
1
Basic Speed Status
This assembly provides: Drive fault, running forward, and output speed
in RPM.
4 x
msec
71
Extended Speed Status
This assembly provides: Drive fault, Drive warning, running forward,
running reverse, Drive ready, network control enabled, network
reference enabled, at reference, Drive state, and output speed in RPM.
4 x
msec
72
Basic Speed/Torque Status
This assembly provides: Drive fault, running forward, output speed in
RPM, and output torque in N-m.
6 x
msec
73
Extended Speed/Torque Status
This assembly provides: Drive fault, Drive warning, running forward,
running reverse, Drive ready, network control enabled, network
reference enabled, at reference, Drive state, output speed in RPM, and
output torque in N-m.
6 x
msec
130 *
2
Speed Status 1
This assembly provides: running, at zero speed, Drive reversing, fault
reset, at speed, Drive ready, Drive alarm, Drive fault, during ride-thru,
local/remote, motor selection, zero servo complete, and output speed in
Hz.
4 x
msec
131 *
2
Current Status 1
This assembly provides: running, at zero speed, Drive reversing, fault
reset, at speed, Drive ready, Drive alarm, Drive fault, during ride-thru,
local/remote, motor selection, zero servo complete, and output current
in Amps.
4 x
msec
132 *
2
Current & Speed Status
This assembly provides: running, at zero speed, Drive reversing, fault
reset, at speed, Drive ready, Drive alarm, Drive fault, during ride-thru,
local/remote, motor selection, zero servo complete, output current in
Amps, and output speed in Hz.
6 x
msec
134 *
2
Speed Status 2
This assembly provides: running, at zero speed, Drive reversing, fault
reset, at speed, Drive ready, Drive alarm, Drive fault, motor speed in
Hz, and access to Drive parameters.
8 x
msec
135 *
2
Torque Status 2
Assembly provides: running, at zero speed, Drive reversing, fault
reset, at speed, Drive ready, Drive alarm, Drive fault, output torque in %
of rated torque, and access to Drive parameters.
8 x
msec
136 *
2
Speed and Torque Status
This assembly provides: running, at zero speed, Drive reversing, fault
reset, at speed, Drive ready, Drive alarm, Drive fault, output torque in %
of rated torque, motor speed in Hz, and frequency reference in Hz.
8 x
msec
*
1
Assembly 70 is the default Polled Producing Assembly.
*
2
Yaskawa specific Polled Producing Assembly.