Examples of encoders, Interface, Data transfer – HEIDENHAIN PWM 20 User Manual
Page 222
November 2014
Interface description
223
EnDat 2.2 (includes EnDat 2.1)
Position values for incremental and absolute encoders
Additional information on the position value
- Diagnosis and test values
- Absolute position values after referencing incremental encoders
- Send and receive parameters
- Commutation
- Acceleration
- Limit position signal
- Temperature of encoder board
- Temperature monitoring of an external temperature sensor (e.g. in motor coil)
EnDat 2.1
Absolute position values
Send and receive parameters
Reset
Test command and test values
Bold: Standard version
* = Ordering designation
Examples of
encoders
LC / ROC / ECN / ROQ / EQN/ECI/EQI ...
Interface
EnDat (serial, bidirectional)
Data transfer
Absolute position values, parameters and additional information
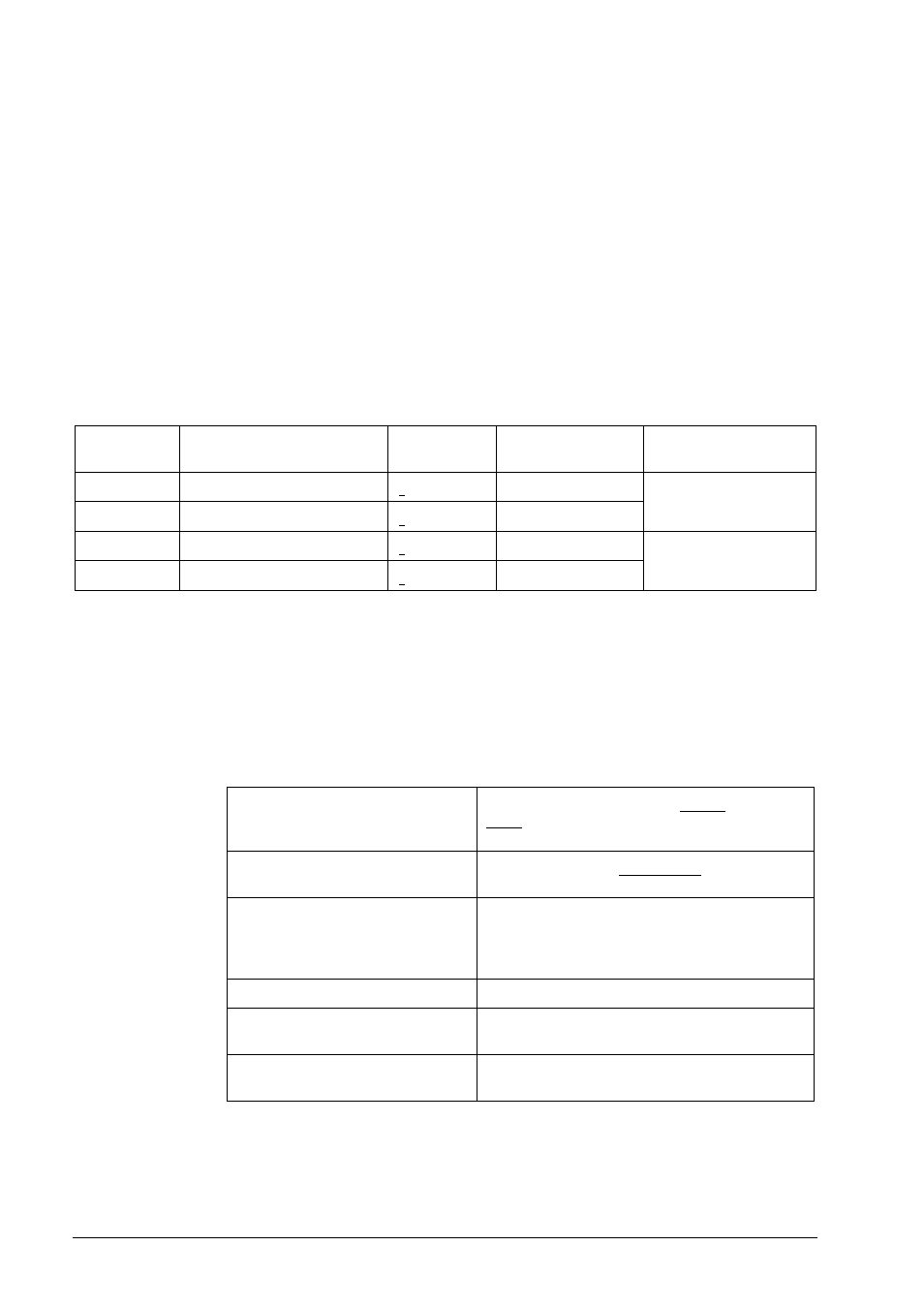
Interface
Version
Clock
frequency
Name on ID label *
Voltage supply
EnDat 2.1
With incremental signals
2 MHz
EnDat 01
See specifications
Without incremental signals
2 MHz
EnDat 21
of the device
EnDat 2.2
With incremental signals
2 MHz
EnDat 02
Extended range
Without incremental signals
16 MHz
EnDat 22
3.6 to 5.25 V or 14 V
<
<
<
<
Data input
Differential line receiver according to EIA standard
RS 485 for the signals CLOCK, CLOCK, DATA and
DATA
Data output
Differential line driver according to EIA standard
RS485 for DATA and DATA signals
Signal level
Differential voltage output
> 1.7 V with 120
load *
(EIA standard RS 485)
* Terminating resistor and receiver input resistor
Code
Pure binary code
LC traversing direction
Rising code values with traverse to the right
(ID plate is on the left side!)
ROC direction of rotation
Rising code values with CCW rotation
(view onto shaft)