Yaskawa VS-616G5 Series Revision F Programming Manual User Manual
Page 129
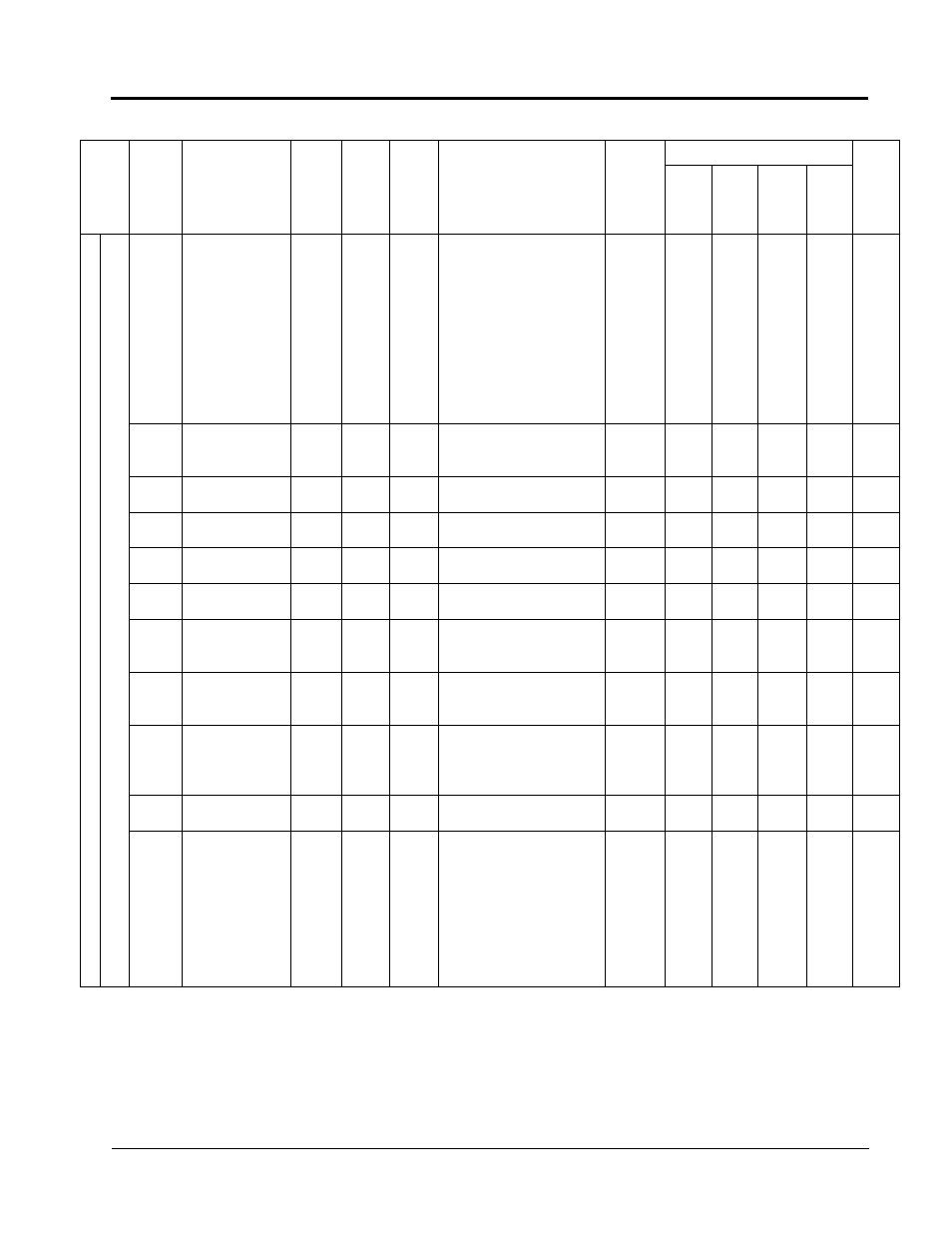
VS-616G5 Programming Manual
129
G
ro
up
b
A
pp
lic
at
io
n
Fu
nc
tio
n
b
5
PI
D
C
on
tro
l
B5-01
PID Control Mode
Selection
(PID Mode)
0 ~ 4
1
0
0: (Disabled)
1: (Enabled D=Fdbk)
2: Enabled D = Feed–For-
ward (Enabled D=Fdfwd)
3: Reference = Frequency
Reference + PID Output
(Fref+PID D=Fdbk)
4: Reference = Frequency
Reference + PID Output
D is feed-forward
(Fref+PID D=Fdfwd)
x
A
A
A
A
B5-02
Proportional Gain
(P)
(PID Gain)
0.00~
25.00
0.01
1.00
—
o
A
A
A
A
B5-03
Integral (I) Time
(PID I Time)
0.0~
360.0
0.1s
1.0
—
o
A
A
A
A
B5-04
Integral (I) Limit
(PID I Limit)
0.0~
100.0
0.1%
100
—
o
A
A
A
A
B5-05
Derivative (D) Time
(PID D Time)
0.00~
10.00
0.01s
0.00
—
o
A
A
A
A
B5-06
PID Limit
(PID Limit)
0.00~
100.0
0.1%
100.0
—
o
A
A
A
A
B5-07
PID Offset
Adjustment
(PID Offset)
–100.0 ~
+100.0
0.1%
0.0
—
o
A
A
A
A
B5-08
PID Primary Delay
Time
(PID Delay Time)
0.00~
10.00
0.01s
0.00
—
o
A
A
A
A
B5-09
<1110>
PID Output
Selection
(Output Level Sel)
0, 1
1
0
0: PID Forward Output [X 1]
(Normal Character)
1: PID Reverse Output [X–1]
(Rev Character)
x
A
A
A
A
B5-10
<1110>
PID Output Gain
(Output Gain)
0.0 ~
25.0
.1
1.0
–
x
A
A
A
A
B5-11
<1110>
PID Output Reverse
Selection
(Output Rev Sel)
0, 1
1
0
0: When PID output is nega-
tive, motor direction is not
changed, PID output is lim-
ited to 0.
(0 limit)
1: When PID output is nega-
tive, motor reverses direc-
tion.
(Reverse)
x
A
A
A
A
Function
Parameter
No.
Name
(Digital Operator
Display)
Setting
Range
Setting
Unit
Factory
Setting
Remarks
(Digital Operator Display)
Change
during
Operation
o: Enabled
x: Disabled
Parameter Access Level
User
Setting
V/f
V/f
w/
PG
Open
Loop
Vector
Flux
Vector
Appendix
VS-616G5 Parameter List B Application