Beckhoff – BECKHOFF AX2000 CANopen communication profile User Manual
Page 70
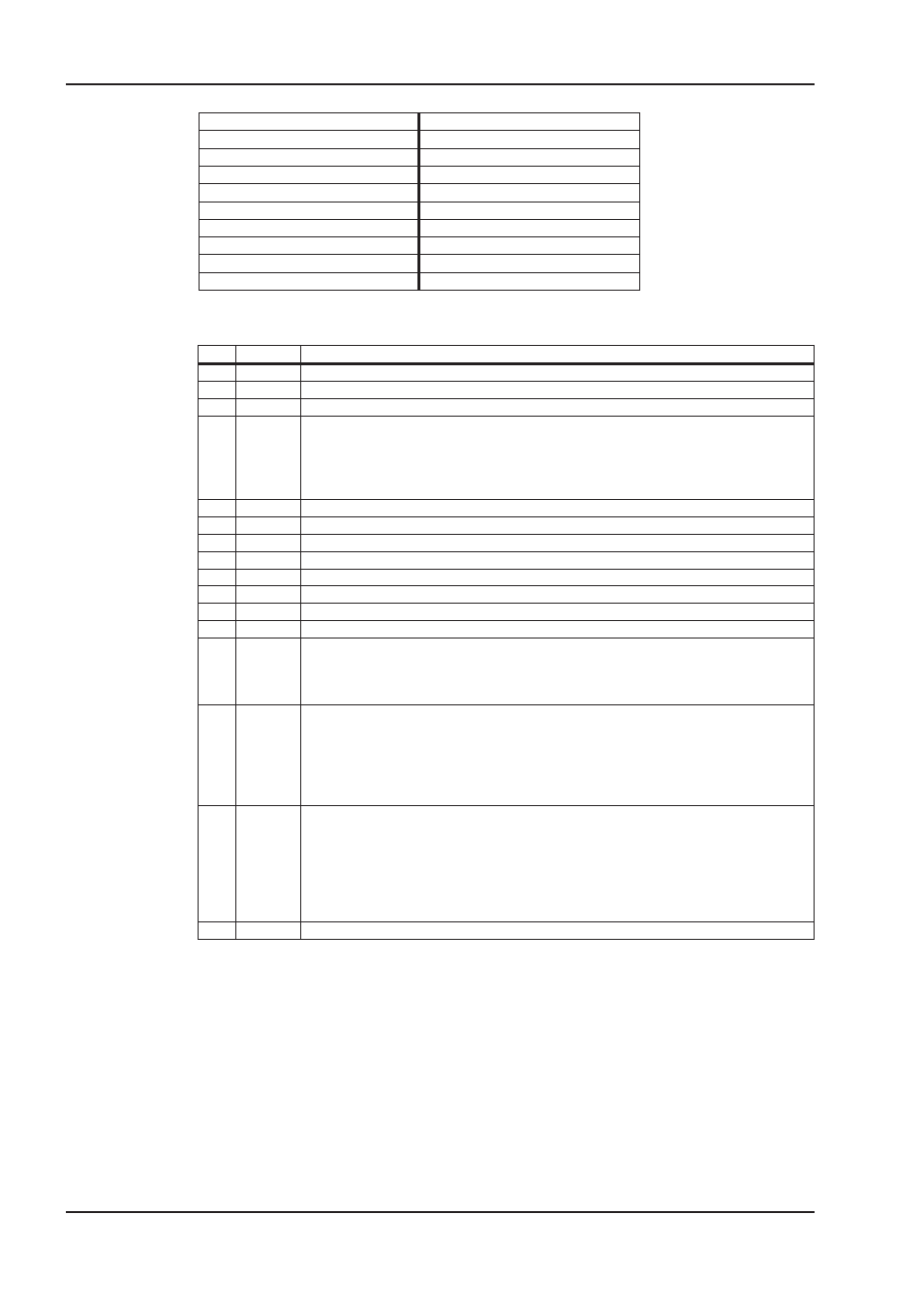
Sub-index
03
h
Brief description
motion task type
Mode
pp
Access
rw
PDO mapping
not possible
Data type
UNSIGNED8
Unit
—
Value range
0 ... FFFF
h
EEPROM
no
Default value
0
Used to set motion parameters for the motion task. The interpretation of the bits is shown in the fol-
lowing tables.
Bit
Value
Meaning
0
0x0001
h
Bit for type of relative/absolute motion block (see table 2)
1
0x0002
h
Bit for type of relative motion block (see table 2)
2
0x0004
h
Bit for type of relative motion block (see table 2)
3
0x0008
h
=0 No following (next) motion block available.
Drive stops when target position has been reached.
=1 Following motion block available. Next motion block starts automatically
when target position has been reached. The number of the next
motion block is given by the command O_FN.
4
0x0010
h
Bit for type of next motion block (see table 3)
5
0x0020
h
Bit for type of next motion block (see table 3)
6
0x0040
h
Bit for type of next motion block (see table 3)
7
0x0080
h
Bit for type of next motion block (see table 3)
8
0x0100
h
Bit for type of next motion block (see table 3)
9
0x0200
h
reserved
10
0x0400
h
reserved
11
0x0800
h
reserved
12
0x1000
h
=0 Acceleration and deceleration are given as acceleration/deceleration
time (in msec) from 0 to target velocity (or reversed).
=1 Acceleration and deceleration are given mm/sec².
(see also commands: O_ACC1, O_ACC2, O_DEC1, O_DEC2).
13
0x2000
h
=0 Target position and target velocity are interpreted as increments.
There is no conversion of the values.
=1 Before the start of the motion block, the target position and target
velocity are converted into increments.
The conversion uses the parameters PGEARI and PGEARO.
(see also commands: O_S, O_V, PGEARI, PGEARO)
14
0x4000
h
=0 When the motion block starts, the velocity for the motion block
is taken as the target velocity.
=1 The target velocity is provided as an analog value (SW1) at the start of
the motion block. The analog SW1 value is read at the start of the
motion block, and taken as the target velocity.
(scaling: 10V=VSCALE1).
The sign of the SW1 voltage is ignored.
15
0x8000
h
Bit 3 for type of relative motion block (see separate table)
70
CANopen for AX2000/2500
CANopen Drive Profile
07/2007
BECKHOFF