Yaskawa VS-616G5 Series Revision F Quick-Start User Manual
Page 86
VS-616G5 Installation & Quick-Start Manual
83
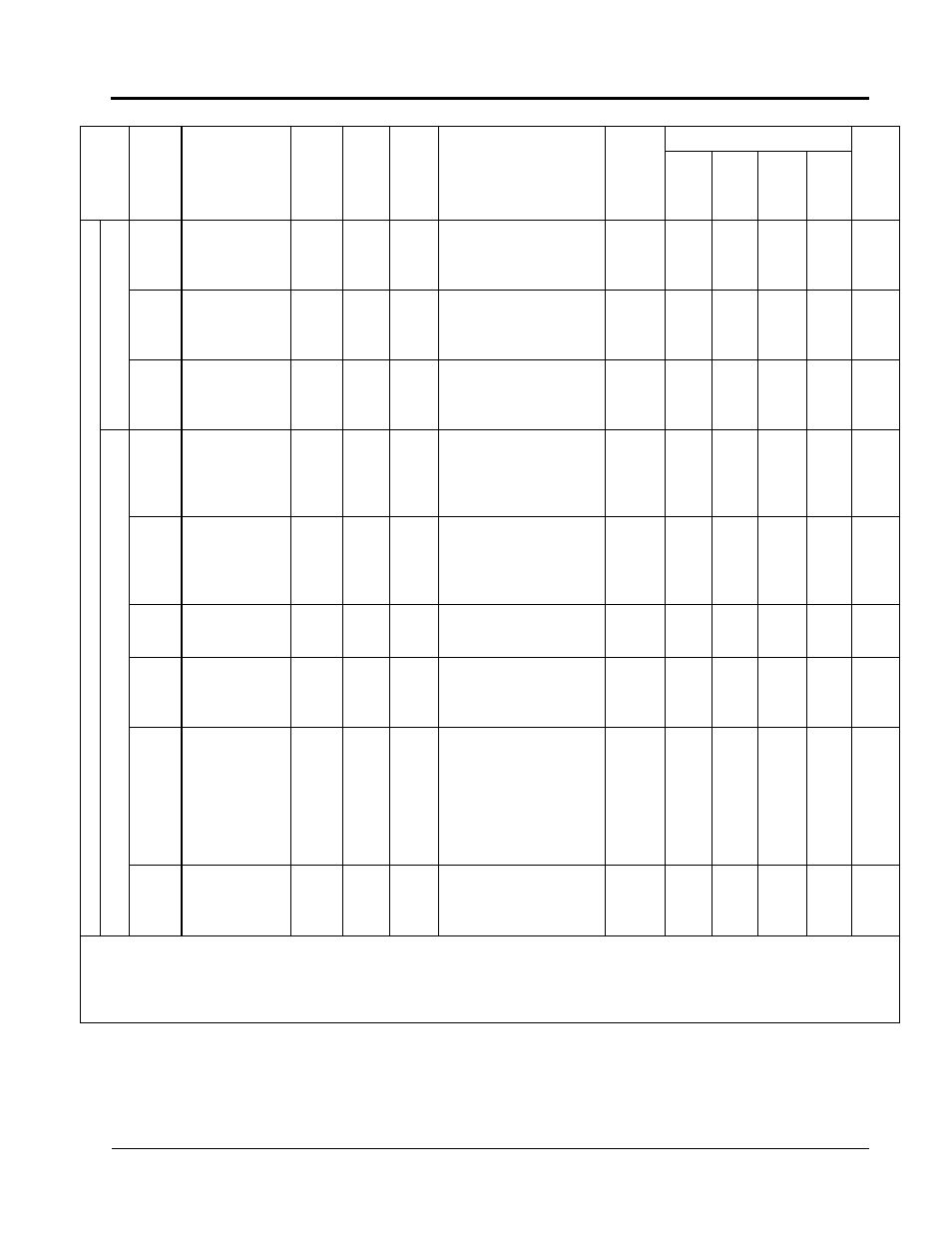
Grou
p C T
uni
ng
Func
tion
C2 S-
Cur
ve Ac
c/
Dec
C2-01
S-Curve Character-
istic Time at Accel-
eration Start
(SCrv Acc@ Start)
0.00~
2.50
0.01s
0.20
—
x
A
A
A
A
C2-02
S-Curve Character-
istic Time at Accel-
eration End
(SCrv Acc@ End)
0.00~
2.50
0.01s
0.20
—
x
A
A
A
A
C2-03
S-Curve Character-
istic Time at Decel-
eration Start
(SCrv Dec @ Start)
0.00~
2.50
0.01s
0.20
—
x
A
A
A
A
Fu
ncti
on
C3 Mot
or Sl
ip
Compe
nsati
on
C3-01
Slip Compensation
Gain
(Slip Comp Gain)
0.0~2.5
0.1
1.0*
* Default factory setting is 0.0
when A1-02=0 [V/F mode].
When A1-02=2 [Open Loop
Vector] or 3 [Flux Vector]
default factory setting is 1.0
o
B
-
B
B
C3-02
Slip Compensation
Primary Delay Time
(Slip Comp Time)
0~10000 1 ms
200*
* Default factory setting is
2000ms when A1-02=0 [V/F
mode]. When A1-02=2 [Open
Loop Vector] default factory
setting is 200ms.
x
A
-
A
-
C3-03
Slip Compensation
Limit
(Slip Comp Limt)
0~250
1%
200
—
x
A
-
A
-
C3-04
Slip Compensation
Selection during
Regeneration
(Slip Comp Regen)
0, 1
1
0
0 : Disabled
1 : Enabled
x
A
-
A
-
C3-05
<1110>
Flux Calculation
Method
( Flux Select)
0, 1
1
0
0 : Magnetic flux is calculated
by output frequency after
compensation. (Slip
Included)
1 : Magnetic flux is calcu-
lated by output frequency
before compensation.
(Slip Excluded)
x
-
-
A
-
C3-06
<1110>
Output Voltage
Limit Operation
Selection
(Output V limit)
0, 1
1
0
0 : Disabled (Note 10)
1 : Enabled (Note 11)
x
-
-
A
A
Note 10 When this parameter is “0” slip compensation will be disabled when the motor is operating above its base speed. The motor voltage will not be reduced above base
speed.
Note 11 Open Loop Vector: When this parameter is set to “1” the motor voltage will be reduced slightly when the motor is operating above 90% base speed. Slip Compensa-
tion is enabled. Speed control accuracy is improved. This may prevent speed instabilities due to motor voltage saturation. This setting may improve speed regulation
however motor torque/amp will be reduced by up to 10% due to motor voltage reduction above base speed. Flux Vector: Torque linearity is improved.
Function
Parameter
No.
Name
(Digital Operator
Display)
Setting
Range
Setting
Unit
Factory
Setting
Remarks
(Digital Operator Display)
Change
during
Operation
o: Enabled
x: Disabled
Parameter Access Level
User
Setting
V/f
V/f
w/
PG
Open
Loop
Vector
Flux
Vector
Appendix
VS-616G5 Parameters