Configuration, 12 replacing a ball joint insert – Adept s650HS Quattro User Manual
Page 175
Chapter 9: Maintenance - HS
Configuration
If the replacement platform has the same part number as the old platform, the robot does not
need to be reconfigured.
If the replacement platform is a different type of platform, for instance, replacing a 185°
platform with a P31 platform, the new configuration needs to be loaded using Adept ACE
software.
NOTE: The P30, P31, P32, and P34 platforms have stainless steel ball studs, and
must be used with Delrin inserts.
Binary SPEC files are available in the SPECDATA directory on the CompactFlash card of the
Adept controller. These files contain configuration data for the available Adept Quattro robot
platforms. The robot will not operate correctly if the wrong SPEC file is loaded. (If these files
are not on your CompactFlash card, you can copy them from your V+ system CD-ROM.)
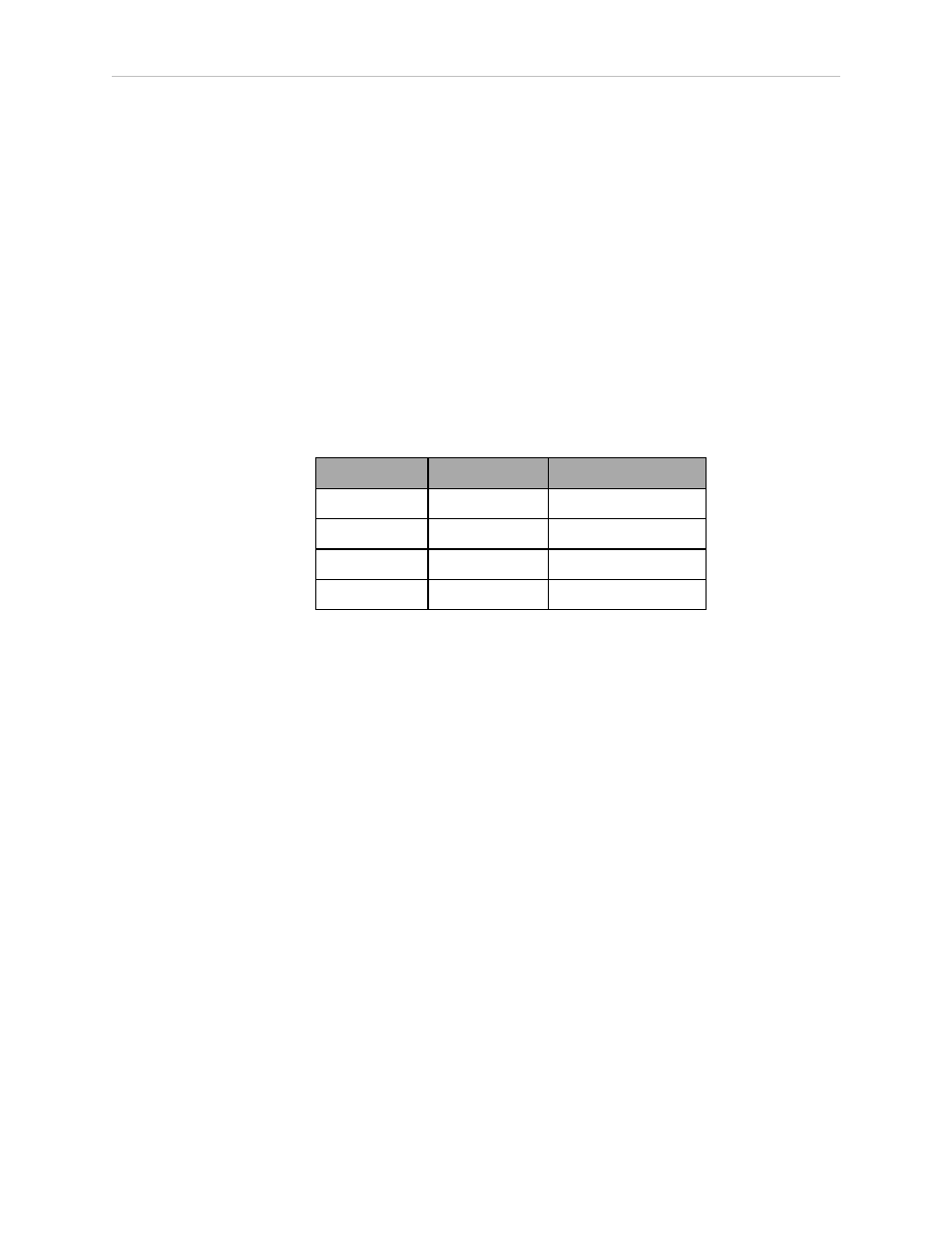
Platform Data Files:
Platform
Tool Rotation
SPEC File
P31
± 46.25°
QP09503.SPC
P30
0°
QP09730.SPC
P32
±92.5°
QP09732.SPC
P34
±185°
QP09734.SPC
From the Adept ACE software:
1. Open the robot object editor.
You can do this by double-clicking on the robot in the tree structure pane.
2. Click the Configure tab.
3. Select Load Spec File . . .
4. Select Load Platform File.
Click Next.
5. Select the new platform from the list.
Click Next.
The wizard will say Working - Please wait, and then return to the robot object editor.
9.12 Replacing a Ball Joint Insert
The inserts used in the ball joints for the Quattro HS robots must seal very tightly. If simply
pushed into the ball joint socket, it forms a pocket of compressed air that pushes the insert
back out.
Because of this, the ball joint insert must be cooled sufficiently to make it shrink. It can then be
inserted into the ball joint, where it will warm up and expand to form a seal.
Adept Quattro User's Guide, Rev F
Page 175 of 196