6 intended use of the robots, 7 installation overview – Adept s650HS Quattro User Manual
Page 23
Chapter 1: Introduction
The Manufacturer’s Declaration of Conformity (MDOC) lists all standards with which each
robot complies. See Manufacturer’s Declaration on page 24.
The
Adept Robot Safety Guide
provides detailed information on safety for Adept robots. It also
gives resources for more information on relevant standards. It ships with each robot manual,
and is also available from the Adept Document Library. For details, see Adept Document
Library on page 25.
1.6 Intended Use of the Robots
The Adept Quattro s650 robot is intended for use in parts assembly and material handling for
payloads up to 6.0 kg (13.2 lb) for anodized and electroless nickel platforms, and payloads up
to 3 kg (6.6 lb) for stainless steel platforms.
The Adept Quattro s800 robot is intended for use in parts assembly and material handling for
payloads up to 4.0 kg (8.8 lb).
See Robot Specifications on page 120 for complete information on the robot specifications.
Refer to the
Adept Robot Safety Guide
for details on the intended use of Adept robots.
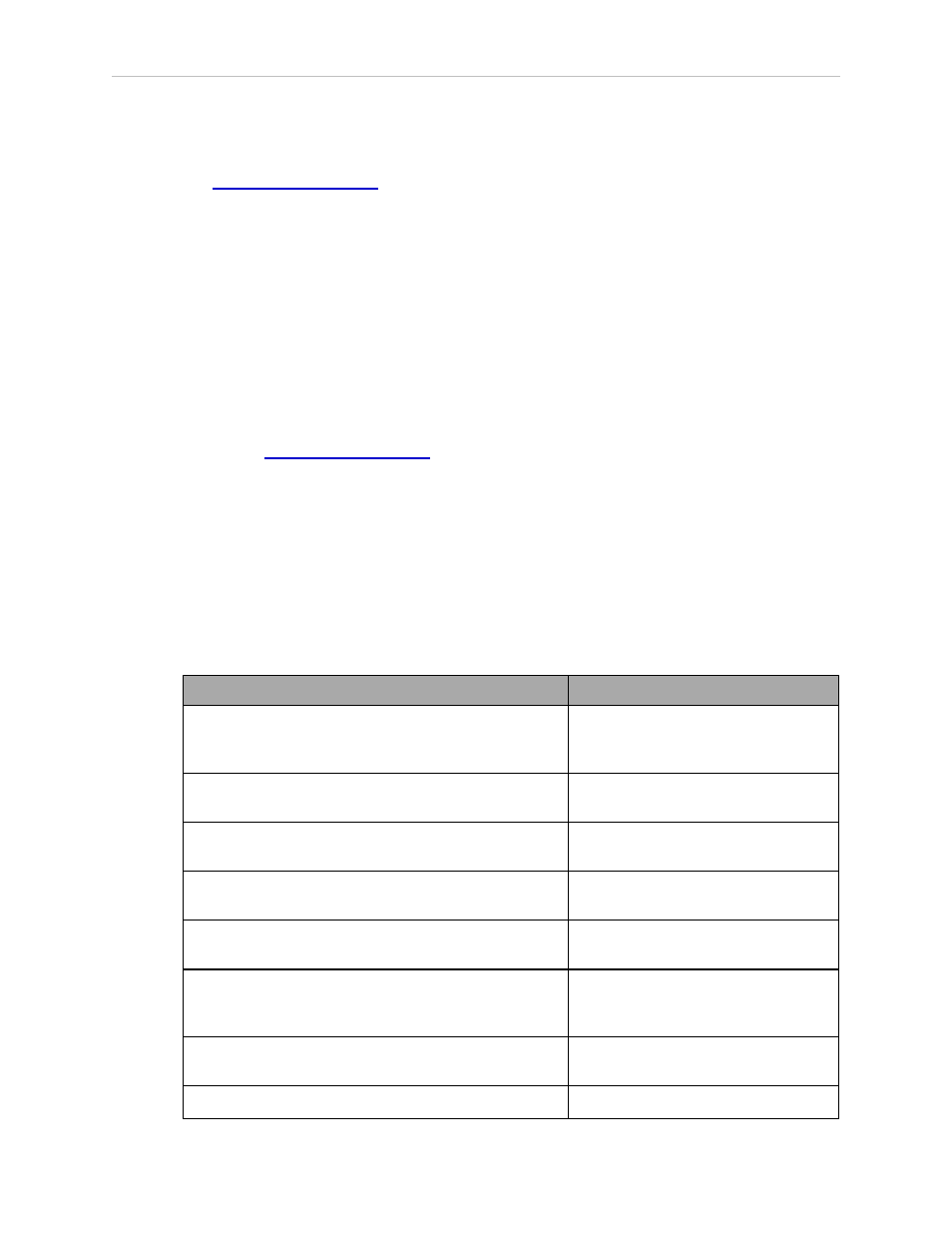
1.7 Installation Overview
NOTE: For dual-robot installations, see the Adept Dual-Robot Configuration
Procedure, which is available in the Adept Document Library.
Table 1-2. Installation Overview
Task to be Performed
Reference Location
Mount the cable box (Quattro HS robot or Quattro H
robot with IP-65 option).
Cable Inlet Box on page 48 and
Installing Cable Seal Kit on page
184.
Mount the robot to a level, stable mounting frame.
Mounting the Robot Base on page
32.
Attach the robot outer arms and platform.
Attaching the Outer Arms and
Platform on page 37.
Install the SmartController, Front Panel, Pendant (if
purchased), and Adept ACE software.
Installing the SmartController
Motion Controller on page 72.
Install the IEEE 1394 and XSYS cables between the
robot and SmartController.
Cable Connections from Robot to
SmartController on page 75.
Create a 24 VDC cable and connect it between the
SmartController and the user-supplied 24 VDC
power supply.
Installing the SmartController
Motion Controller on page 72.
Create a 24 VDC cable and connect it between the
robot and the user-supplied 24 VDC power supply.
Connecting 24 VDC Power to Robot
on page 76.
Create a 200-240 VAC cable and connect it between
Connecting 200-240 VAC Power to
Adept Quattro User's Guide, Rev F
Page 23 of 196