8 attaching the outer arms and platform – Adept s650HS Quattro User Manual
Page 59
Chapter 3: Robot Installation - HS
The frame pads should completely cover the gaskets.
l
Tighten the bolts to 98 N·m (74 ft-lb).
NOTE: The robot base-mounting tabs have spring-lock HeliCoils in the M16 holes,
so a lock washer is not needed on the M16 mounting bolts.
NOTE: Check the tightness of the mounting bolts one week after initial installation,
and then recheck every 3 months. See Periodic Maintenance on page 154.
Table 3-2. Mounting Bolt Torque Specifications
Standard
Size
Minimum Specification
Torque
Metric
M16-2.0 x 40 mm
ISO Property Class 5.8
98 N·m (74 ft-lb)
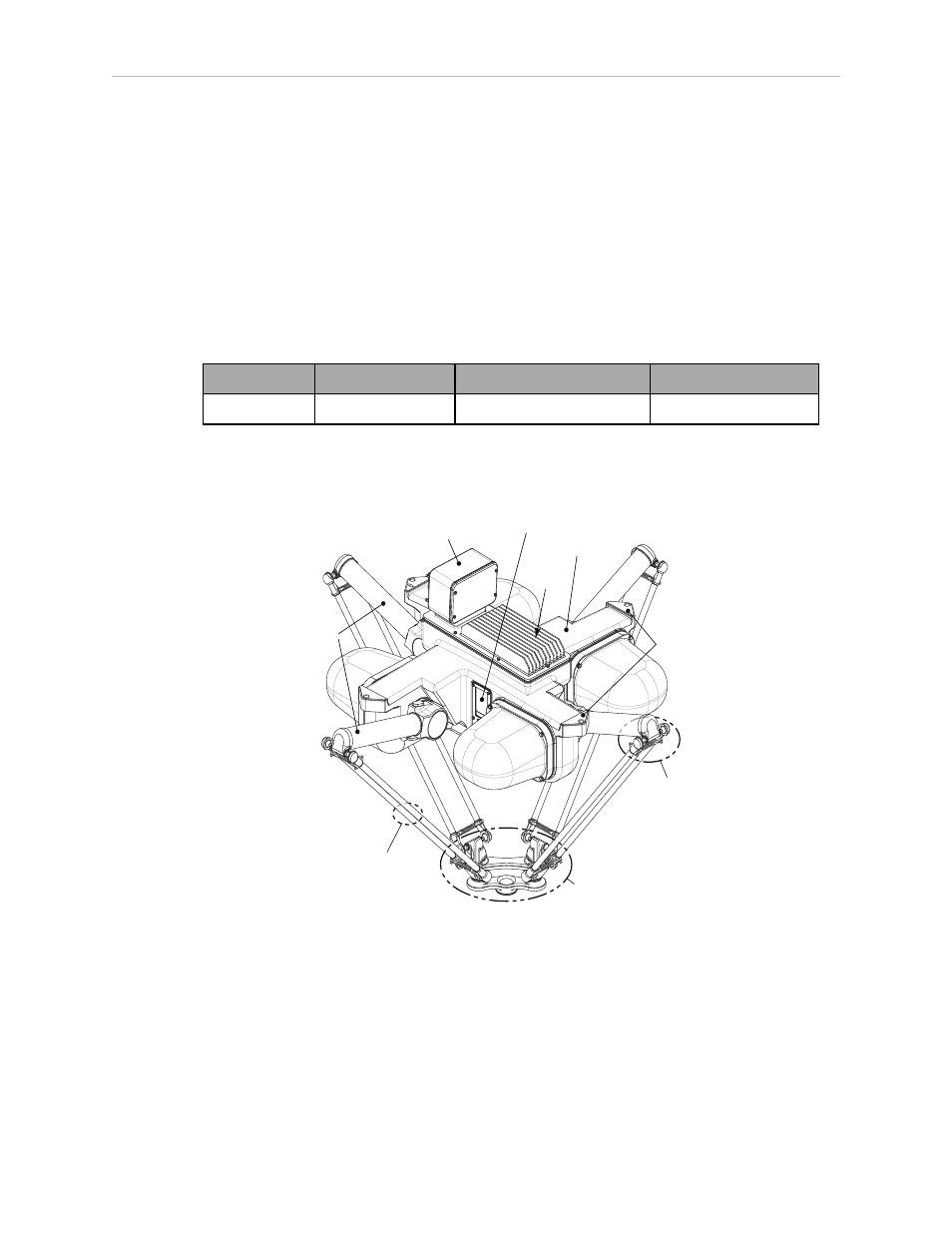
3.8 Attaching the Outer Arms and Platform
Outer
Arms
Platform
(P31 shown)
Cable Inlet Box
Inner
Arms
Motor
Cover
AIB
Mounting
Pads
Base
Ball Joints
and Spring
Assemblies
Status Display
Panel
Figure 3-16. Major Robot Components, Top View
The Adept Quattro robot platform is attached to the inner arms by the outer arms.
NOTE: Except for attaching the outer arms and end-effector tooling, the platform is
shipped fully assembled.
Adept Quattro User's Guide, Rev F
Page 59 of 196