2 ecat event request (ecat interrupt), 3 clearing interrupts accidentally, Ecat event request (ecat interrupt) – BECKHOFF EtherCAT Technology Section I User Manual
Page 103: Clearing interrupts accidentally, Figure 42: ecat interrupt masking
Interrupts
Slave Controller
– Technology
I-83
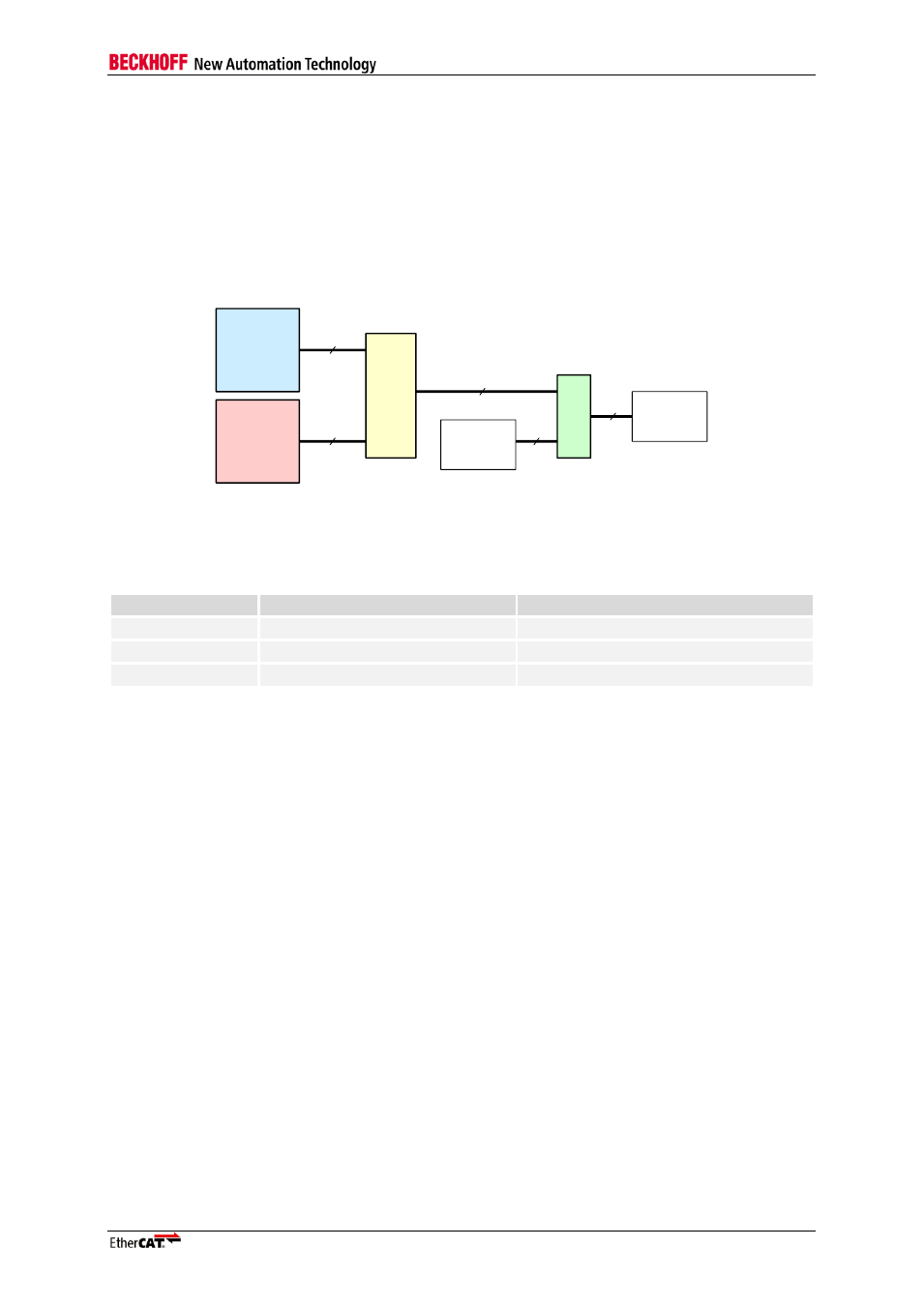
12.2 ECAT Event Request (ECAT Interrupt)
ECAT event requests are used to inform the EtherCAT master of slave events. ECAT events make
use of the IRQ field inside EtherCAT datagrams. The ECAT Event Request register (0x0210:0x0211)
is combined with the ECAT Event Mask register (0x0200:0x0201) using a logical AND operation. The
resulting interrupt bits are combined with the incoming ECAT IRQ field using a logical OR operation,
and written into the outgoing ECAT IRQ field. The ECAT Event Mask register allows for selecting the
interrupts which are relevant for the EtherCAT master and handled by the master application.
NOTE: The master cannot distinguish which slave (or even more than one) was the origin of an interrupt.
16
16
16
16
&
ECAT Event
Request
Register
(0x0210:0x0211)
ECAT Event
Mask
Register
(0x0200:0x0201)
16
≥1
Received
ECAT Event
Transmitted
ECAT Event
Figure 42: ECAT Interrupt Masking
Registers used for ECAT Interrupts are described in Table 48:
Table 48: Registers for ECAT Event Request Configuration
Register Address
Name
Description
0x0200:0x0201
ECAT Event Mask
Mask register
0x0210:0x0211
ECAT Event Request
Pending Interrupts
0x0804 + N*8
SyncManager Control
Mapping SyncManager Interrupts
NOTE: Some of these registers are not available in specific ESCs. Refer to Section II for details.
12.3 Clearing Interrupts Accidentally
Event request registers and register actions which clear interrupts are intended to be accessed
independently, i.e., with separate EtherCAT frames or separate PDI accesses. Otherwise it may
happen that interrupts and/or data are missed.
Examples:
Using SPI to read a SyncManager buffer: polling SyncManager buffers and interrupts delivered at
the beginning of each SPI access in the same access can lead to missed interrupts/data. Fault
scenario: the interrupt is not pending while the interrupts delivered at the beginning of the access
are sampled. The µController gets the information “no interrupt”, but it continues reading the
SyncManager buffer because the read command cannot be stopped without causing a PDI error.
If the SyncManager Interrupt occurs in the time windows between interrupt sampling and buffer
reading, new buffer data will be delivered and the interrupt is acknowledged. As a consequence,
the µController application will ignore the new data because no interrupt was set.
Solution: Read the SyncManager buffer only if the IRQ signal indicates a pending interrupt or if a
preceding access indicates pending interrupts.
Using a single ECAT frame to read DC Latch0/1 status and Latch Time registers: the status
registers may indicate no event, but if the event occurs in the time window between reading status
and time registers, the new latch time will be delivered and the corresponding interrupt is cleared
directly. The master gets the information “no interrupt”, but new latch times, so it will ignore the
time values and the interrupt/data is missed.
Solution: Read DC Latch time registers only if an ECAT event was indicated in a previous frame or
if the DC Latch status registers were polled in a previous frame.